armax
Estimate parameters of ARMAX, ARIMAX, ARMA, or ARIMA model using time-domain data
Syntax
Description
Estimate ARMAX or ARMA Model
sys = armax(tt,[na
nb nc nk])idpoly model sys using the data contained in the
variables of timetable tt. The software uses the first
Nu variables as inputs and the next Ny variables
as outputs, where Nu and Ny are determined from the
dimensions of nb and na, respectively.
For ARMA models, which have no input signals, use sys =
armax(tt,na). In this case, the software fits the model using the first
Ny variables.
armax performs the estimation using the prediction-error method
and the polynomial orders specified in [na nb nc nk]. The model
properties include estimation covariances (parameter uncertainties) and goodness of fit
between the estimated and the measured data.
To select specific input and output channels from tt, use
name-value syntax to set 'InputName' and
'OutputName' to the corresponding timetable variable names.
sys = armax(u,y,[na nb nc nk])u,y. The software assumes that the data sample
time is 1 second. To change the sample time, set Ts using name-value
syntax.
sys = armax(data,[na
nb nc nk])iddata object data. Use this syntax especially when you
want to take advantage of the additional information, such as data sample time or
experiment labeling, that data objects provide.
sys = armax(___,Name,Value)'IntegrateNoise',1 estimates an ARIMAX or ARIMA model, which
is useful for systems with nonstationary disturbances. Specify
Name,Value after any of the previous input-argument
combinations.
Configure Initial Parameters
Specify Additional Estimation Options
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = armax(___)initialCondition
object. Use this syntax if you plan to simulate or predict the model response using the
same estimation input data and then compare the response with the same estimation output
data. Incorporating the initial conditions yields a better match during the first part of
the simulation.
Examples
Estimate an ARMAX model and view the fit of the model output to the estimation data.
Load the measurement data in the timetable tt2.
load sdata2 tt2
Estimate an ARMAX model with second-order ,, and polynomials and a transport delay of one sample period.
na = 2; nb = 2; nc = 2; nk = 1; sys = armax(tt2,[na nb nc nk])
sys =
Discrete-time ARMAX model: A(z)y(t) = B(z)u(t) + C(z)e(t)
A(z) = 1 - 1.512 z^-1 + 0.7006 z^-2
B(z) = -0.2606 z^-1 + 1.664 z^-2
C(z) = 1 - 1.604 z^-1 + 0.7504 z^-2
Sample time: 0.1 seconds
Parameterization:
Polynomial orders: na=2 nb=2 nc=2 nk=1
Number of free coefficients: 6
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using ARMAX on time domain data "tt2".
Fit to estimation data: 85.89% (prediction focus)
FPE: 1.086, MSE: 1.054
Model Properties
The output displays the polynomial containing the estimated parameters alongside the estimation details. Under Status, Fit to estimation data shows that the estimated model has 1-step-ahead prediction accuracy above 80%.
Compare the model simulated output to the measured data.
compare(tt2,sys)
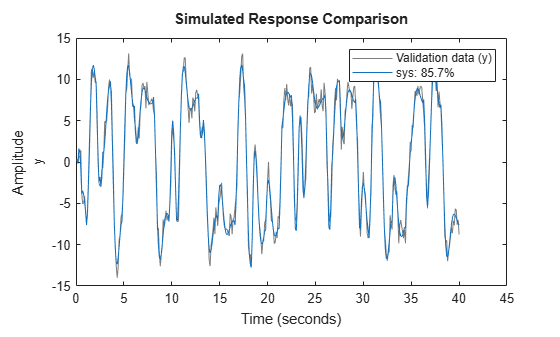
The fit of the simulated model to the measured data is nearly the same as the estimation fit.
Estimate an ARMA model and compare its response with both the measured output and an AR model.
Load the data, which contains the time series ymat9 with noise.
load sdata9 ymat9
Estimate a fourth-order ARMA model with a first-order polynomial.
na = 4; nc = 1; sys = armax(ymat9,[na nc]);
Estimate a fourth-order AR model.
sys_ar = ar(ymat9,na);
Compare the model outputs with the measured data.
compare(ymat9,sys,sys_ar)
The ARMA model has the better fit to the data.
Estimate an ARMAX model from measured data and specify estimation options.
Load the data and create an iddata object. Initialize option set opt, and set options for Focus, SearchMethod, MaxIterations, and Display. Then estimate the ARMAX model using the updated option set.
load twotankdata; z = iddata(y,u,0.2); opt = armaxOptions; opt.Focus = 'simulation'; opt.SearchMethod = 'lm'; opt.SearchOptions.MaxIterations = 10; opt.Display = 'on'; sys = armax(z,[2 2 2 1],opt);
The termination conditions for measured component of the model shown in the progress viewer is that the maximum number of iterations were reached.
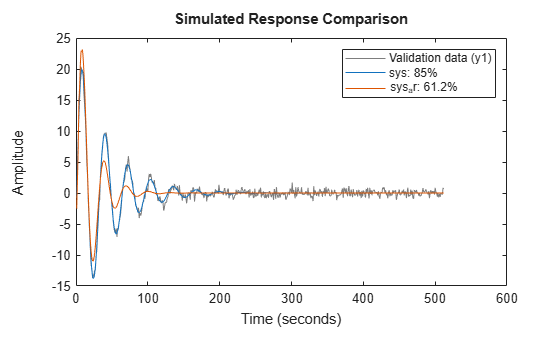
To improve results, re-estimate the model using a greater value for MaxIterations, or continue iterations on the previously estimated model as follows:
sys2 = armax(z,sys); compare(z,sys,sys2)
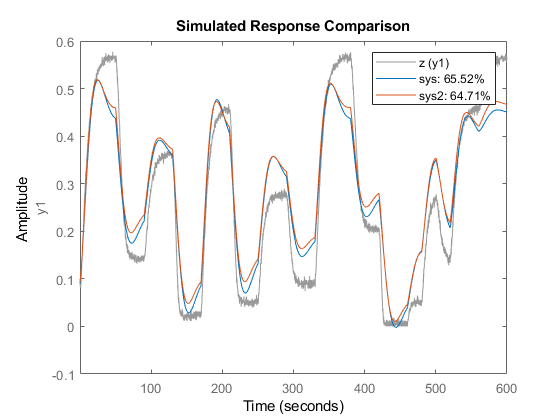
where sys2 refines the parameters of sys to improve the fit to data.
Estimate a regularized ARMAX model by converting a regularized ARX model.
Load data.
load regularizationExampleData.mat m0simdata;
Estimate an unregularized ARMAX model of order 30.
m1 = armax(m0simdata(1:150),[30 30 30 1]);
Estimate a regularized ARMAX model by determining the Lambda value by trial and error.
opt = armaxOptions; opt.Regularization.Lambda = 1; m2 = armax(m0simdata(1:150),[30 30 30 1],opt);
Obtain a lower order ARMAX model by converting a regularized ARX model and then performing order reduction.
opt1 = arxOptions; [L,R] = arxRegul(m0simdata(1:150),[30 30 1]); opt1.Regularization.Lambda = L; opt1.Regularization.R = R; m0 = arx(m0simdata(1:150),[30 30 1],opt1); mr = idpoly(balred(idss(m0),7));
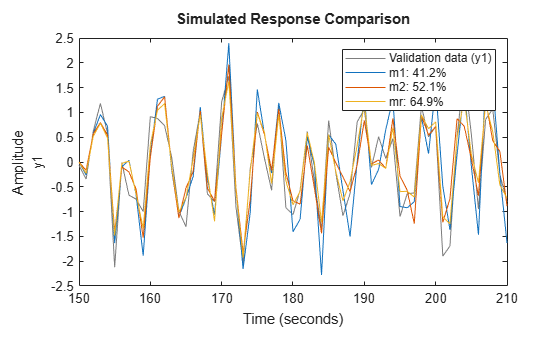
Compare the model outputs against the data.
opt2 = compareOptions('InitialCondition','z'); compare(m0simdata(150:end),m1,m2,mr,opt2);
Estimate a fourth-order ARIMA model for univariate time-series data.
Load data that contains a time series with noise.
load iddata9 z9;
Integrate the output signal and use the result to replace the original output signal in z9.
z9.y = cumsum(z9.y);
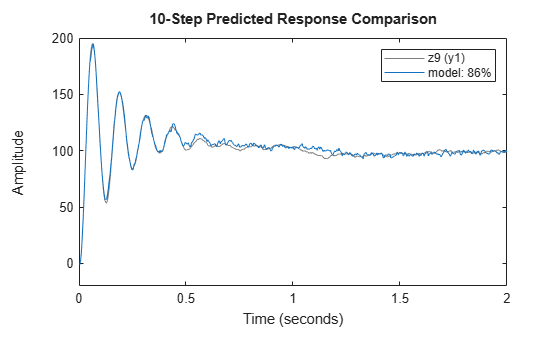
Estimate a fourth-order ARIMA model with a first-orderpolynomial by setting 'IntegrateNoise' to true.
model = armax(z9,[4 1],'IntegrateNoise',true); Predict the model output using 10-step ahead prediction, and compare the predicted output with the estimation data.
compare(z9,model,10)
Estimate ARMAX models of varying orders iteratively from measured data.
Load dryer2 data and perform estimation for combinations of polynomial orders na, nb, nc, and input delay nk.
load dryer2; z = iddata(y2,u2,0.08,'Tstart',0); na = 2:4; nc = 1:2; nk = 0:2; models = cell(1,18); ct = 1; for i = 1:3 na_ = na(i); nb_ = na_; for j = 1:2 nc_ = nc(j); for k = 1:3 nk_ = nk(k); models{ct} = armax(z,[na_ nb_ nc_ nk_]); ct = ct+1; end end end
Stack the estimated models and compare their simulated responses to the estimation data z.
models = stack(1,models{:});
compare(z,models)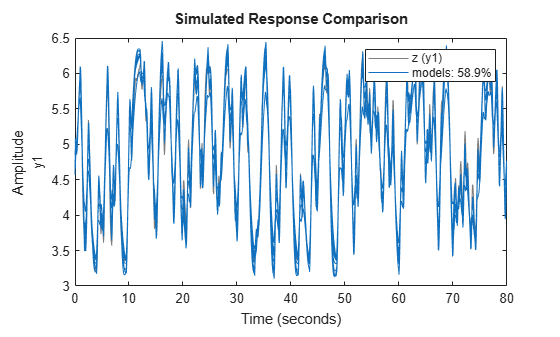
Load the estimation data.
load sdata2 umat2 ymat2
Estimate a state-space model of order 3 from the estimation data.
sys0 = n4sid(umat2,ymat2,3);
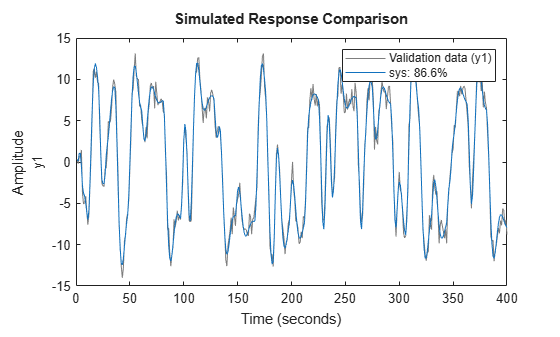
Estimate an ARMAX model using the previously estimated state-space model to initialize the parameters.
sys = armax(umat2,ymat2,sys0); compare(umat2,ymat2,sys)
Load the data.
load iddata1ic z1i
Estimate a second-order ARMAX model sys and return the initial conditions in ic.
na = 2; nb = 2; nc = 2; nk = 1; [sys,ic] = armax(z1i,[na nb nc nk]); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0 1]
Ts: 0.1000
ic is an initialCondition object that encapsulates the free response of sys, in state-space form, to the initial state vector in X0. You can incorporate ic when you simulate sys with the z1i input signal and compare the response with the z1i output signal.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
An iterative search algorithm minimizes a robustified quadratic prediction error criterion. The iterations are terminated when any of the following is true:
Maximum number of iterations is reached.
Expected improvement is less than the specified tolerance.
Lower value of the criterion cannot be found.
You can get information
about the stopping criteria using sys.Report.Termination.
Use the armaxOptions option set to create and configure options
affecting the estimation results. In particular, set the search algorithm attributes, such as
MaxIterations and Tolerance, using the
'SearchOptions' property.
When you do not specify initial parameter values for the iterative search as an initial model, they are constructed in a special four-stage LS-IV algorithm.
The cutoff value for the robustification is based on the
Advanced.ErrorThreshold estimation option and on the estimated standard
deviation of the residuals from the initial parameter estimate. The cutoff value is not
recalculated during the minimization. By default, no robustification is performed; the default
value of ErrorThreshold option is 0.
To ensure that only models corresponding to stable predictors are tested, the algorithm performs a stability test of the predictor. Generally, both and (if applicable) must have all zeros inside the unit circle.
Minimization information is displayed on the screen when
the estimation option 'Display' is 'On' or
'Full'. When 'Display' is 'Full',
both the current and the previous parameter estimates are displayed in column-vector form, and
the parameters are listed in alphabetical order. Also, the values of the criterion function
(cost) are given and the Gauss-Newton vector and its norm are displayed. When
'Display' is 'On', only the criterion values are
displayed.
Alternatives
armax does not support continuous-time model estimation. Use
tfest to estimate a continuous-time transfer function model, or ssest to estimate a continuous-time state-space model.
armax supports only time-domain data. For frequency-domain data, use
oe to estimate an Output-Error (OE) model.
References
[1] Ljung, L. System Identification: Theory for the User, Second Edition. Upper Saddle River, NJ: Prentice-Hall PTR, 1999. See chapter about computing the estimate.