deconvlucy
Deblur image using Lucy-Richardson method
Syntax
Description
J = deconvlucy(I,psf)I that was degraded by convolution with a
point-spread function (PSF), psf, and possibly by additive
noise. The algorithm is based on maximizing the likelihood that the resulting image
J is an instance of the original image
I under Poisson statistics.
To improve the restoration, deconvlucy supports several
optional parameters, described below. Use [] as a placeholder if
you do not specify an intermediate parameter.
J = deconvlucy(I,psf,iter,dampar,weight)I are considered in
the restoration. The value of an element in the weight array
determines how much the pixel at the corresponding position in the input image is
considered. For example, to exclude a pixel from consideration, assign it a value of
0 in the weight array. You can adjust
the weight value assigned to each pixel according to the amount of flat-field
correction.
Examples
Remove Gaussian Blur Using deconvlucy
Read and display a pristine image that does not have blur or noise. This example optionally crops the image to a size of 256-by-256 with the top-left (x,y) coordinate at (2,50).
I = imread('board.tif'); I = imcrop(I,[2 50 255 255]); imshow(I) title('Original Image')
Create a PSF that represents a Gaussian blur with standard deviation 5 and filter of size 5-by-5.
PSF = fspecial('gaussian',5,5);Simulate blur in the image.
blurred = imfilter(I,PSF,'symmetric','conv');
Add simulated zero-mean Gaussian noise.
V = 0.002; blurred_noisy = imnoise(blurred,'gaussian',0,V); imshow(blurred_noisy) title('Blurred and Noisy Image')
Use deconvlucy to restore the blurred and noisy image. Specify the PSF used to create the blur and decrease the number of iterations to 5.
luc1 = deconvlucy(blurred_noisy,PSF,5);
imshow(luc1)
title('Restored Image')
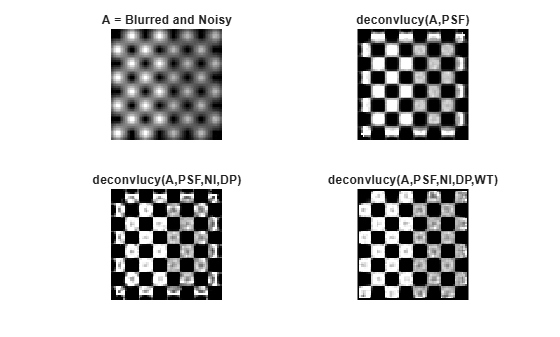
Remove Blur Using Several deconvlucy Optional Syntaxes
Create a sample image and blur it.
I = checkerboard(8); PSF = fspecial('gaussian',7,10); V = .0001; BlurredNoisy = imnoise(imfilter(I,PSF),'gaussian',0,V);
Create a weight array and call deconvlucy using several optional parameters.
WT = zeros(size(I)); WT(5:end-4,5:end-4) = 1; J1 = deconvlucy(BlurredNoisy,PSF); J2 = deconvlucy(BlurredNoisy,PSF,20,sqrt(V)); J3 = deconvlucy(BlurredNoisy,PSF,20,sqrt(V),WT);
Display the results.
subplot(221);imshow(BlurredNoisy); title('A = Blurred and Noisy'); subplot(222);imshow(J1); title('deconvlucy(A,PSF)'); subplot(223);imshow(J2); title('deconvlucy(A,PSF,NI,DP)'); subplot(224);imshow(J3); title('deconvlucy(A,PSF,NI,DP,WT)');
Input Arguments
Output Arguments
Tips
You can use
deconvlucyto perform a deconvolution that starts where a previous deconvolution stopped. To use this feature, pass the input imageIas a cell array,{I}. When you do, thedeconvlucyfunction returns the output imageJas a cell array, which you can then pass as the input array into the nextdeconvlucycall. The output cell arrayJcontains four elements:J{1}containsI, the original image.J{2}contains the result of the last iteration.J{3}contains the result of the next-to-last iteration.J{4}is an array generated by the iterative algorithm.The output image
Jcould exhibit ringing introduced by the discrete Fourier transform used in the algorithm. To reduce the ringing, useI = edgetaper(I,psf)before callingdeconvlucy.deconvlucyconverts the PSF todoublewithout normalization.deconvlucycan return values in the output image that are beyond the range of the input image.
References
[1] D.S.C. Biggs and M. Andrews, Acceleration of iterative image restoration algorithms, Applied Optics, Vol. 36, No. 8, 1997.
[2] R.J. Hanisch, R.L. White, and R.L. Gilliland, Deconvolutions of Hubble Space Telescope Images and Spectra, Deconvolution of Images and Spectra, Ed. P.A. Jansson, 2nd ed., Academic Press, CA, 1997.
Extended Capabilities
Version History
Introduced before R2006aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)