normxcorr2
Normalized 2-D cross-correlation
Description
Examples
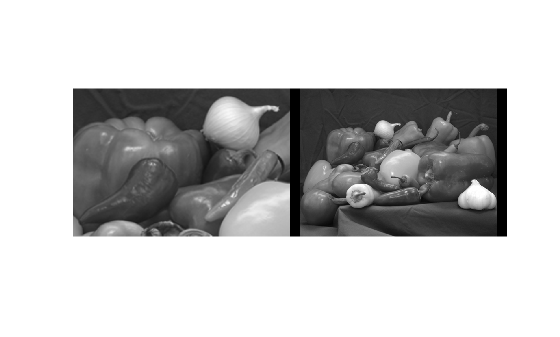
Read two images into the workspace, and convert them to grayscale for use with normxcorr2. Display the images side-by-side.
onion = im2gray(imread("onion.png")); peppers = im2gray(imread("peppers.png")); montage({onion,peppers})
Perform cross-correlation and display the result as a surface.
c = normxcorr2(onion,peppers);
surf(c)
shading flat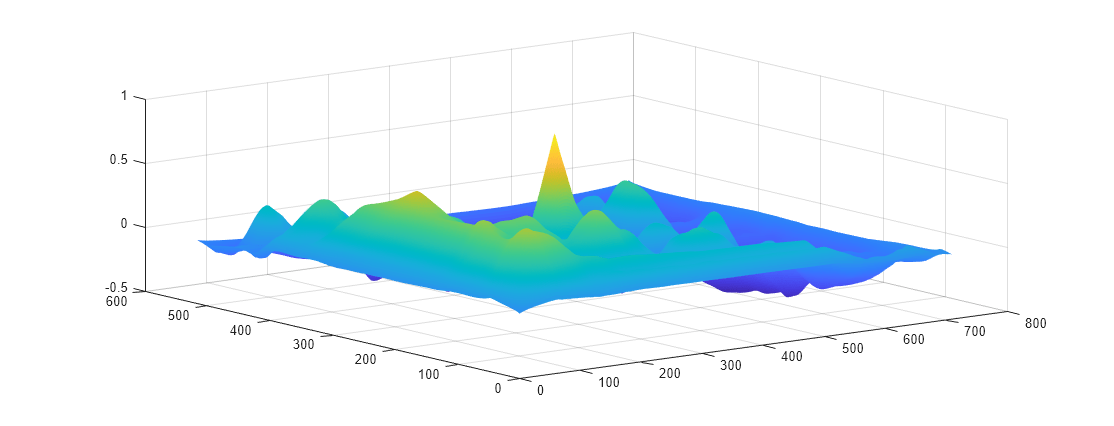
Find the peak in cross-correlation.
[ypeak,xpeak] = find(c==max(c(:)));
Account for the padding that normxcorr2 adds.
yoffSet = ypeak-size(onion,1); xoffSet = xpeak-size(onion,2);
Display the matched area by using the drawrectangle function. The Position name-value argument specifies the upper left coordinate, width, and height of the rectangle as the 4-element vector [xmin,ymin,width,height]. Specify the face of the rectangle as fully transparent.
imshow(peppers)
drawrectangle(gca,Position=[xoffSet,yoffSet,size(onion,2),size(onion,1)], ...
FaceAlpha=0);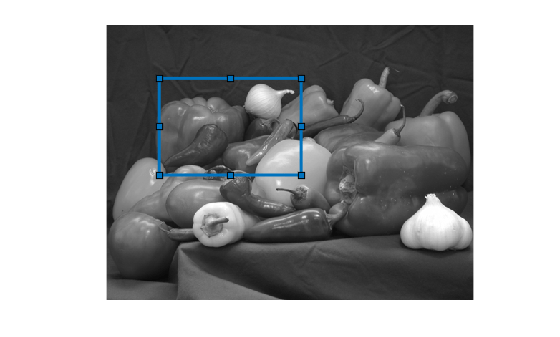
Input Arguments
Output Arguments
Algorithms
normxcorr2 uses the following general procedure [1], [2]:
Calculate cross-correlation in the spatial or the frequency domain, depending on size of images.
Calculate local sums by precomputing running sums.
Use local sums to normalize the cross-correlation to get correlation coefficients.
The implementation closely follows the formula from [1]:
where
is the image.
is the mean of the template
is the mean of in the region under the template.
References
[1] Lewis, J. P. "Fast Normalized Cross-Correlation." Industrial Light & Magic, 1995. https://scribblethink.org/Work/nvisionInterface/nip.pdf.
[2] Haralick, Robert M., and Linda G. Shapiro, Computer and Robot Vision, Volume II, Addison-Wesley, 1992, pp. 316-317.