transclosure
Transitive closure
Syntax
Description
H = transclosure(G)G as a new graph, H. The nodes in
H are the same as those in G, but
H has additional edges. If there is a path from node
i to node j in G, then
there is an edge between node i and node j in
H. For multigraphs with multiple edges between the same two
nodes, the output graph replaces these with a single edge.
Examples
Create and plot a directed graph.
G = digraph([1 2 3 4 4 4 5 5 5 6 7 8],[2 3 5 1 3 6 6 7 8 9 9 9]); plot(G)
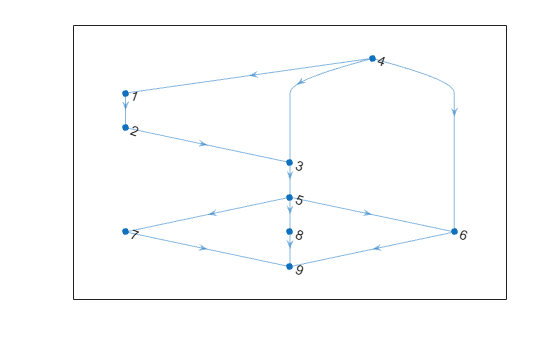
Find the transitive closure of graph G and plot the resulting graph. H contains the same nodes as G, but has additional edges.
H = transclosure(G); plot(H)
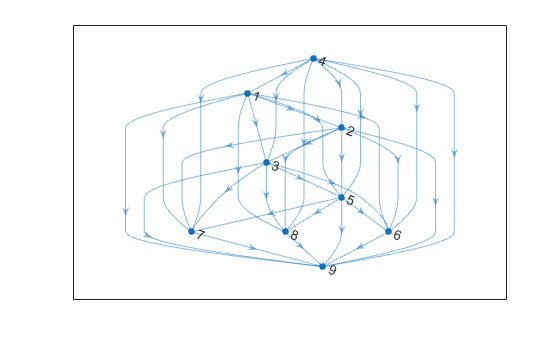
The transitive closure information in H can be used to answer reachability questions about the original graph, G.
Determine the nodes in G that can be reached from node 1. These nodes are the successors of node 1 in the transitive closure graph, H.
N = successors(H,1)
N = 7×1
2
3
5
6
7
8
9
Create and plot a directed graph.
s = [1 1 2 2 3 4 4 5]; t = [2 4 3 4 5 5 6 6]; G = digraph(s,t); plot(G,'Layout','subspace')
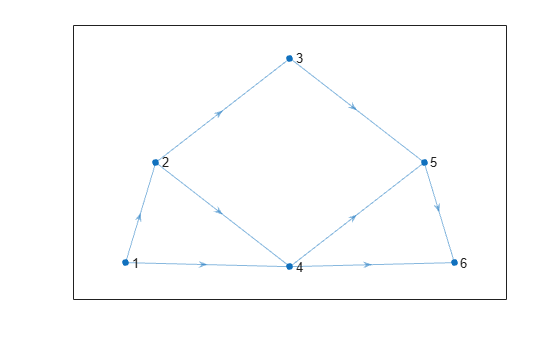
Calculate the adjacency matrix of the transitive closure of G. The result is a reachability matrix, which has nonzero values to indicate which nodes are reachable from each node.
D = transclosure(G); R = full(adjacency(D))
R = 6×6
0 1 1 1 1 1
0 0 1 1 1 1
0 0 0 0 1 1
0 0 0 0 1 1
0 0 0 0 0 1
0 0 0 0 0 0
For example, to answer the question "Which nodes are reachable from node 3?", you can look at the third row in the matrix. That row indicates only nodes 5 and 6 are reachable from node 3:
find(R(3,:))
ans = 1×2
5 6
Input Arguments
Output Arguments
More About
Version History
Introduced in R2015b
See Also
digraph | transreduction | conncomp | successors | predecessors