lu
LU matrix factorization
Syntax
Description
Full or Sparse Data
Sparse Data
[___] = lu(
specifies thresholds for the pivoting strategy employed by
S,thresh)lu using any of the previous output argument
combinations for sparse matrices. Depending on the number of output arguments
specified, the default value and requirements for the thresh
input are different. See the thresh argument description
for details.
[___] = lu(___,
returns outputForm)P and Q in the form specified by
outputForm. Specify outputForm as
'vector' to return P and
Q as permutation vectors. You can use any of the input
argument combinations in previous syntaxes for sparse matrices.
Examples
Compute the LU factorization of a matrix and examine the resulting factors. LU factorization is a way of decomposing a matrix into an upper triangular matrix , a lower triangular matrix , and a permutation matrix such that . These matrices describe the steps needed to perform Gaussian elimination on the matrix until it is in reduced row echelon form. The matrix contains all of the multipliers, and the permutation matrix accounts for row interchanges.
Create a 3-by-3 matrix and calculate the LU factors.
A = [10 -7 0
-3 2 6
5 -1 5];[L,U] = lu(A)
L = 3×3
1.0000 0 0
-0.3000 -0.0400 1.0000
0.5000 1.0000 0
U = 3×3
10.0000 -7.0000 0
0 2.5000 5.0000
0 0 6.2000
Multiply the factors to recreate A. With the two-input syntax, lu incorporates the permutation matrix P directly into the L factor, such that the L being returned is really P'*L and thus A = L*U.
L*U
ans = 3×3
10 -7 0
-3 2 6
5 -1 5
You can specify three outputs to separate the permutation matrix from the multipliers in L.
[L,U,P] = lu(A)
L = 3×3
1.0000 0 0
0.5000 1.0000 0
-0.3000 -0.0400 1.0000
U = 3×3
10.0000 -7.0000 0
0 2.5000 5.0000
0 0 6.2000
P = 3×3
1 0 0
0 0 1
0 1 0
P'*L*U
ans = 3×3
10 -7 0
-3 2 6
5 -1 5
Solve a linear system by performing an LU factorization and using the factors to simplify the problem. Compare the results with other approaches using the backslash operator and decomposition object.
Create a 5-by-5 magic square matrix and solve the linear system with all of the elements of b equal to 65, the magic sum. Since 65 is the magic sum for this matrix (all of the rows and columns add to 65), the expected solution for x is a vector of 1s.
A = magic(5); b = 65*ones(5,1); x = A\b
x = 5×1
1.0000
1.0000
1.0000
1.0000
1.0000
For generic square matrices, the backslash operator computes the solution of the linear system using LU decomposition. LU decomposition expresses A as the product of triangular matrices, and linear systems involving triangular matrices are easily solved using substitution formulas.
To recreate the answer computed by backslash, compute the LU decomposition of A. Then, use the factors to solve two triangular linear systems:
y = L\(P*b); x = U\y;
This approach of precomputing the matrix factors prior to solving the linear system can improve performance when many linear systems will be solved, since the factorization occurs only once and does not need to be repeated.
[L,U,P] = lu(A)
L = 5×5
1.0000 0 0 0 0
0.7391 1.0000 0 0 0
0.4783 0.7687 1.0000 0 0
0.1739 0.2527 0.5164 1.0000 0
0.4348 0.4839 0.7231 0.9231 1.0000
U = 5×5
23.0000 5.0000 7.0000 14.0000 16.0000
0 20.3043 -4.1739 -2.3478 3.1739
0 0 24.8608 -2.8908 -1.0921
0 0 0 19.6512 18.9793
0 0 0 0 -22.2222
P = 5×5
0 1 0 0 0
1 0 0 0 0
0 0 0 0 1
0 0 1 0 0
0 0 0 1 0
y = L\(P*b); x = U\y
x = 5×1
1.0000
1.0000
1.0000
1.0000
1.0000
The decomposition object also is useful to solve linear systems using specialized factorizations, since you get many of the performance benefits of precomputing the matrix factors but you do not need to know how to use the factors. Use the decomposition object with the 'lu' type to recreate the same results.
dA = decomposition(A,'lu');
x = dA\bx = 5×1
1.0000
1.0000
1.0000
1.0000
1.0000
Compute the LU factorization of a sparse matrix and verify the identity L*U = P*S*Q.
Create a 60-by-60 sparse adjacency matrix of the connectivity graph of the Buckminster-Fuller geodesic dome.
S = bucky;
Compute the LU factorization of S using the sparse matrix syntax with four outputs to return the row and column permutation matrices.
[L,U,P,Q] = lu(S);
Permute the rows and columns of S with P*S*Q and compare the result with multiplying the triangular factors L*U. The 1-norm of their difference is within round-off error, indicating that L*U = P*S*Q.
e = P*S*Q - L*U; norm(e,1)
ans = 2.2204e-16
Compute the LU factorization of a matrix. Save memory by returning the row permutations as a vector instead of a matrix.
Create a 1000-by-1000 random matrix.
A = rand(1000);
Compute the LU factorization with the permutation information stored as a matrix P. Compare the result with the permutation information stored as a vector p. The larger the matrix, the more memory efficient it is to use a permutation vector.
[L1,U1,P] = lu(A); [L2,U2,p] = lu(A,'vector'); whos P p
Name Size Bytes Class Attributes P 1000x1000 8000000 double p 1x1000 8000 double
Using a permutation vector also saves on execution time in subsequent operations. For instance, you can use the previous LU factorizations to solve a linear system . Although the solutions obtained from the permutation vector and permutation matrix are equivalent (up to round-off), the solution using the permutation vector typically requires a little less time.
Compare the results of computing the LU factorization of a sparse matrix with and without column permutations.
Load the west0479 matrix, which is a real-valued 479-by-479 sparse matrix.
load west0479
A = west0479;Calculate the LU factorization of A by calling lu with three outputs. Generate spy plots of the L and U factors.
[L,U,P] = lu(A); subplot(1,2,1) spy(L) title('L factor') subplot(1,2,2) spy(U) title('U factor')
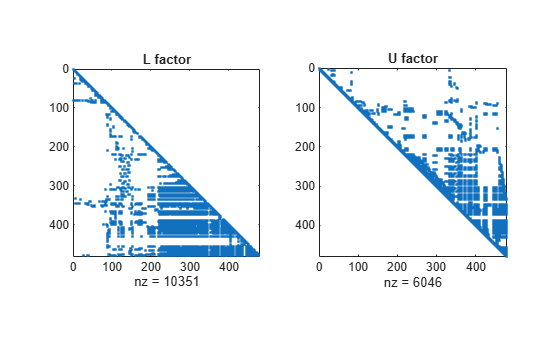
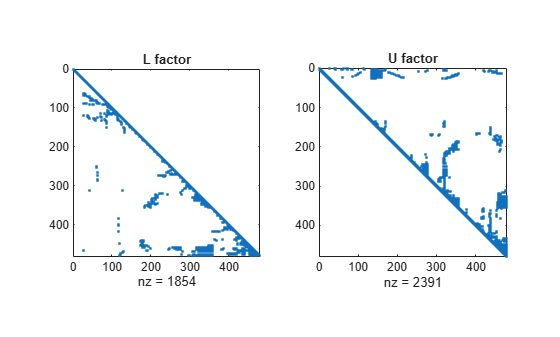
Now, calculate the LU factorization of A using lu with four outputs, which permutes the columns of A to reduce the number of nonzeros in the factors. The resulting factors are much sparser than if column permutations are not used.
[L,U,P,Q] = lu(A); subplot(1,2,1) spy(L) title('L factor') subplot(1,2,2) spy(U) title('U factor')
Input Arguments
Output Arguments
Algorithms
The LU factorization is computed using a variant of Gaussian elimination. Computing an
accurate solution is dependent upon the value of the condition number of the original
matrix cond(A). If the matrix has a large condition number (it is
nearly singular), then the computed factorization might not be accurate.
The LU factorization is a key step in obtaining the inverse with
inv and the determinant with det. It is also
the basis for the linear equation solution or matrix division obtained with the
operators \ and /. This necessarily means that the
numerical limitations of lu are also present in these dependent
functions.
References
[1] Gilbert, John R., and Tim Peierls. “Sparse Partial Pivoting in Time Proportional to Arithmetic Operations.” SIAM Journal on Scientific and Statistical Computing 9, no. 5 (September 1988): 862–874. https://doi.org/10.1137/0909058.
[2] Anderson, E., ed. LAPACK Users’ Guide. 3rd ed. Software, Environments, Tools. Philadelphia: Society for Industrial and Applied Mathematics, 1999. https://doi.org/10.1137/1.9780898719604.
[3] Davis, Timothy A. "Algorithm 832: UMFPACK V4.3 – an unsymmetric-pattern multifrontal method." ACM Transactions on Mathematical Software 30, no. 2 (June 2004): 196–199. https://doi.org/10.1145/992200.992206.