Get Started with Model Predictive Control Toolbox
Model Predictive Control Toolbox™ provides functions, an app, Simulink® blocks, and reference examples for developing model predictive control (MPC). For linear problems, the toolbox supports the design of implicit, explicit, adaptive, and gain-scheduled MPC. For nonlinear problems, you can implement single- and multi-stage nonlinear MPC. The toolbox provides deployable optimization solvers and also enables you to use a custom solver.
You can evaluate controller performance in MATLAB® and Simulink by running closed-loop simulations. For automated driving, you can also use the provided MISRA C™- and ISO 26262-compliant blocks and examples to quickly get started with lane keep assist, path planning, path following, and adaptive cruise control applications.
The toolbox supports C and CUDA® code and IEC 61131-3 Structured Text generation.
Tutorials
- Design Controller Using MPC Designer
Design a model predictive controller for a continuous stirred-tank reactor (CSTR) using MPC Designer.
- Design MPC Controller in Simulink
Design and simulate a model predictive controller for a Simulink model using MPC Designer.
- Design MPC Controller at the Command Line
Design and simulate a model predictive controller at the MATLAB command line.
- Model Predictive Control of a Single-Input-Single-Output Plant
Create and simulate a model predictive controller for a SISO plant.
- Model Predictive Control of Multi-Input Single-Output Plant
Create and simulate a model predictive controller for a plant with multiple inputs and a single output.
- Model Predictive Control of a Multi-Input Multi-Output Nonlinear Plant
Create and simulate a model predictive controller for a MIMO plant.
About Model Predictive Control
- What Is Model Predictive Control?
Introduction to MPC main concepts.
- MPC Signal Types
Plant inputs are independent variables that affect the plant, and plant outputs are dependent variables that you want to control or monitor.
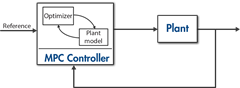
- MPC Prediction Models
Model predictive controllers use plant, disturbance, and noise models for prediction and state estimation.
- Controller State Estimation
MPC controllers use their current state as the basis for predictions. In general, the controller states are unmeasured and must be estimated.
- QP Optimization Problem for Linear MPC
Model predictive controllers compute optimal manipulated variable control moves by solving a quadratic program at each control interval.
- QP Solvers for Linear MPC
The model predictive controller QP solvers convert an MPC optimization problem to a general form quadratic programming problem.
Videos
Why Use MPC?
Understand the benefits of using model predictive control.
What Is MPC?
Understand the working principles of model predictive control.

MPC Design Parameters
Understand common MPC design parameters, such as sample time, horizons,
tuning weights, and constraints.