obstaclePose
Poses of obstacles
Syntax
Description
[
returns the obstacle ID and states for each obstacle in the specified capsule list.obstacleIDs,poseStruct] = obstaclePose(capsuleListObj)
[
specifies which obstacles to return the ID and states for.obstacleIDs,poseStruct] = obstaclePose(capsuleListObj,selectObstacleIDs)
[
returns an indicator of whether each ID in obstacleIDs,poseStruct,status] = obstaclePose(capsuleListObj,selectObstacleIDs)selectObstacleIDs
exists.
Examples
Add obstacles to an environment using the dynamicCapsuleList object. Modify the properties of the obstacles. Remove an obstacle from the environment. Visualize the states of all objects in the environment at different timestamps.
Create the dynamicCapsuleList object. Extract the maximum number of steps to use as the number of time stamps for the object paths.
capsuleList = dynamicCapsuleList; numSteps = capsuleList.MaxNumSteps;
Add Obstacles
Specify the states for the two obstacles as a linear path from x = 0 m to x = 100 m*.* The two obstacles are separated by 10 m in opposite directions on the y-axis.
obsState = linspace(0,1,numSteps)'.*[100 0 0]; obsState1 = obsState+[0 10 0]; obsState2 = obsState+[0 -10 0];
Generate default poses and geometric structures for the two obstacles using obstacle IDs.
[obsIDs,obsPoseStruct] = obstaclePose(capsuleList,[1 2]); [obsIDs,obsGeomStruct] = obstacleGeometry(capsuleList,obsIDs);
Update Obstacles
Assign the states to the obstacles.
obsPoseStruct(1).States = obsState1; obsPoseStruct(2).States = obsState2;
Increase the radius of the first obstacle to 2 m.
obsGeomStruct(1).Geometry.Radius = 2;
Update the obstacles using the updateObstaclePose and updateObstacleGeometry object functions.
updateObstaclePose(capsuleList,obsIDs,obsPoseStruct); updateObstacleGeometry(capsuleList,obsIDs,obsGeomStruct);
Visualize the obstacles.
show(capsuleList,'TimeStep',1:numSteps); axis equal
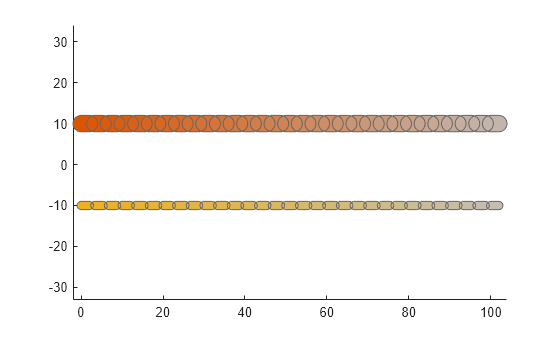
Remove Obstacles
Remove the first obstacle from the capsule list by specifying its ID.
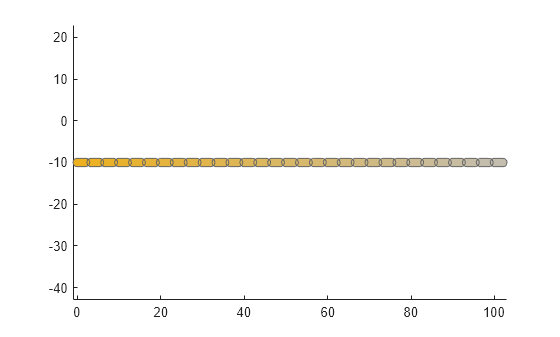
removeObstacle(capsuleList,1);
Visualize the obstacles again.
show(capsuleList,'TimeStep',1:numSteps); axis equal
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2020b