Large Sparse Quadratic Program, Problem-Based
This example shows the value of using sparse arithmetic when you have a sparse problem. The matrix has n rows, where you choose n to be a large value, and a few nonzero diagonal bands. A full matrix of size n-by-n can use up all available memory, but a sparse matrix presents no problem.
The problem is to minimize x'*H*x/2 + f'*x subject to
x(1) + x(2) + ... + x(n) <= 0,
where f = [-1;-2;-3;...;-n]. H is a sparse symmetric banded matrix.
Create Sparse Quadratic Matrix
Create a symmetric circulant matrix H based on shifts of the vector [3,6,2,14,2,6,3], with 14 being on the main diagonal. Have the matrix be n-by-n, where n = 30,000.
n = 3e4;
H2 = speye(n);
H = 3*circshift(H2,-3,2) + 6*circshift(H2,-2,2) + 2*circshift(H2,-1,2)...
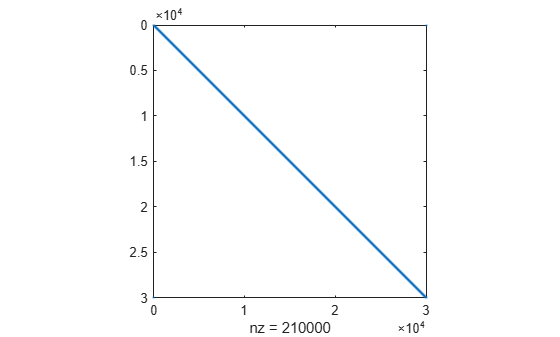
+ 14*H2 + 2*circshift(H2,1,2) + 6*circshift(H2,2,2) + 3*circshift(H2,3,2);View the sparse matrix structure.
spy(H)
Create Optimization Variables and Problem
Create an optimization variable x and problem qprob.
x = optimvar("x",n);
qprob = optimproblem;Create the objective function and constraints. Place the objective and constraints into qprob.
f = 1:n; obj = 1/2*x'*H*x - f*x; qprob.Objective = obj; cons = sum(x) <= 0; qprob.Constraints = cons;
Solve Problem
Solve the quadratic programming problem using the default "interior-point-convex" algorithm and sparse linear algebra. To keep the solver from stopping prematurely, set the StepTolerance option to 0.
options = optimoptions("quadprog",Algorithm="interior-point-convex",... LinearSolver="sparse",StepTolerance=0); [sol,fval,exitflag,output,lambda] = solve(qprob,Options=options);
Solving problem using quadprog. Minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
Examine Solution
View the objective function value, number of iterations, and Lagrange multiplier associated with the linear inequality constraint.
fprintf("The objective function value is %d.\nThe number of iterations is %d.\nThe Lagrange multiplier is %d.\n",... fval,output.iterations,lambda.Constraints)
The objective function value is -3.133073e+10. The number of iterations is 6. The Lagrange multiplier is 1.500050e+04.
Evaluate the constraint to see that the solution is on the boundary.
fprintf("The linear inequality constraint sum(x) has value %d.\n",sum(sol.x))The linear inequality constraint sum(x) has value 4.094818e-08.
The sum of the solution components is zero to within tolerances.
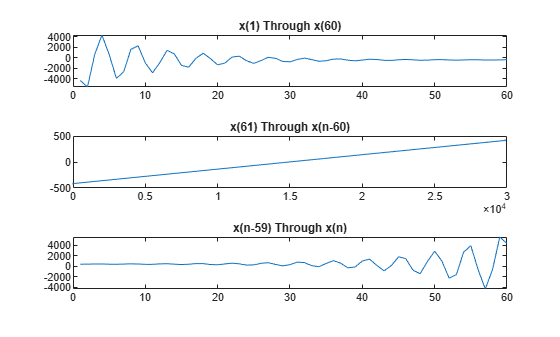
The solution x has three regions: an initial portion, a final portion, and an approximately linear portion over most of the solution. Plot the three regions.
subplot(3,1,1) plot(sol.x(1:60)) title("x(1) Through x(60)") subplot(3,1,2) plot(sol.x(61:n-60)) title("x(61) Through x(n-60)") subplot(3,1,3) plot(sol.x(n-59:n)) title("x(n-59) Through x(n)")