Band Brake
Frictional brake with flexible band wrapped around rotating drum

Libraries:
Simscape /
Driveline /
Brakes & Detents /
Rotational
Description
The Band Brake block represents a frictional brake with a flexible band that wraps around the periphery of a rotating drum to produce a braking action. A positive actuating force causes the band to tighten around the rotating drum and it places the friction surfaces in contact. Viscous and contact friction between the surfaces of the drum and the flexible band causes the rotating drum to decelerate.
You can model the effects of heat flow and temperature change for the block by using port H, an optional thermal conserving port.
Band brakes provide high braking torque at the cost of reduced braking precision in applications that include winch drums, chainsaws, go-karts, and mini-bikes.
Equations
The block uses a simple parameterization with simple brake geometry and friction parameters.
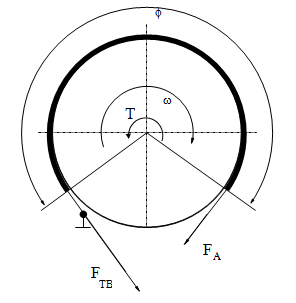
The braking torque as a function of the external brake actuation force that tightens the belt is
Where:
T is the braking torque.
FTB is the tension force acting on the tense branch of the band.
FA is the external brake actuation force.
rD is the drum radius.
μvisc is the viscous friction coefficient.
μ is the contact friction coefficient.
ϕ is the wrap angle.
Forces FTB and FA satisfy the relationship
Replacing the relationship in the braking torque formula eliminates force FTB such that
To avoid discontinuity at zero relative velocity, the model defines the actuation force, FS, as a hyperbolic function
Where:
Fin is the force input signal.
ωthreshold is the angular velocity threshold.
Faults
To model a fault in the Band Brake block, in the Faults section, click the Add fault hyperlink next to the fault that you want to model. For more information about fault modeling, see Fault Behavior Modeling and Fault Triggering.
When you trigger a fault, the block applies the value of the Belt force
when faulted parameter instead of the value at port F
for the remainder of the simulation. When the value is 0, no
braking occurs. When the value is relatively large, the brake is stuck.
Thermal Model
You can model the effects of heat flow and temperature change by exposing the
optional thermal port. To expose the port, in the Friction
settings, set the Thermal Port parameter to
Model.
Limitations and Assumptions
The model does not account for actuator flow consumption.