Get Started with Robotics System Toolbox
Robotics System Toolbox™ provides tools and algorithms for designing, simulating, testing, and deploying manipulator and mobile robot applications. For manipulators, the toolbox includes algorithms for collision checking, path planning, trajectory generation, forward and inverse kinematics, and dynamics using a rigid body tree representation. For mobile robots, it includes algorithms for mapping, localization, path planning, path following, and motion control. The toolbox lets you build test scenarios and use the provided reference examples to validate common industrial robotic applications. It also includes a library of commercially available industrial robot models that you can import, visualize, simulate, and use with the reference applications.
You can develop a functional robot prototype by combining the kinematic and dynamic models provided. The toolbox lets you co-simulate your robot applications by connecting directly to the Gazebo robotics simulator. To verify your design on hardware, you can connect to robotics platforms such as Kinova Gen3 and Universal Robots UR series robots and generate and deploy code (with MATLAB® Coder™ or Simulink® Coder).
Tutorials
- Build a Robot Step by Step
Explore the detailed process of constructing a robot, highlighting different robot components and function calls to build them.
- 2-D Path Tracing with Inverse Kinematics
Calculate inverse kinematics for a simple 2-D manipulator.
- Path Following for a Differential Drive Robot
Drive a simulated robot along a predetermined path using Pure Pursuit path following controller.
- Plan and Execute Task- and Joint-Space Trajectories Using Kinova Gen3 Manipulator
Generate and simulate interpolated joint trajectories to move to a desired end-effector pose using Kinova® Gen3 manipulator.
About Robotics Systems
- Standard Units for Robotics System Toolbox
List of standard units used in the Robotics System Toolbox.
Featured Examples
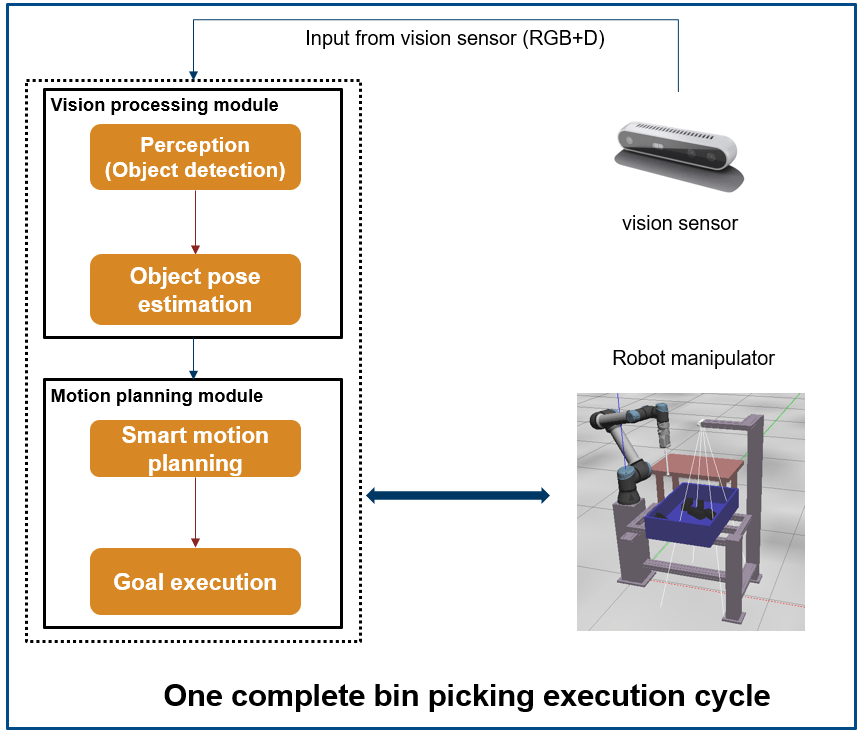
Gazebo Simulation of Semi-Structured Intelligent Bin Picking for UR5e Using YOLO and PCA-Based Object Detection
Detailed workflow for simulating intelligent bin picking using Universal Robots UR5e cobot in Gazebo.
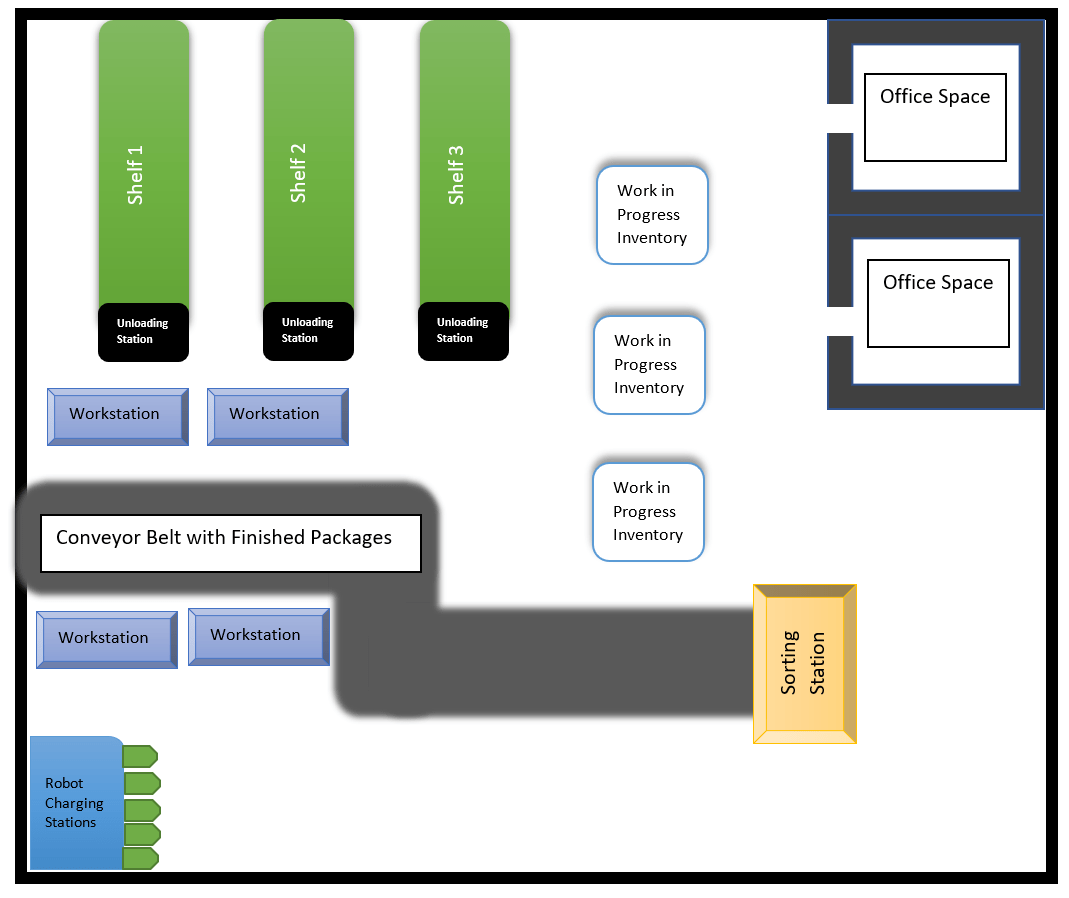
Execute Tasks for a Warehouse Robot
Execute an obstacle-free path for a mobile robot between three locations on a given map of a warehouse.
Teaching Resources
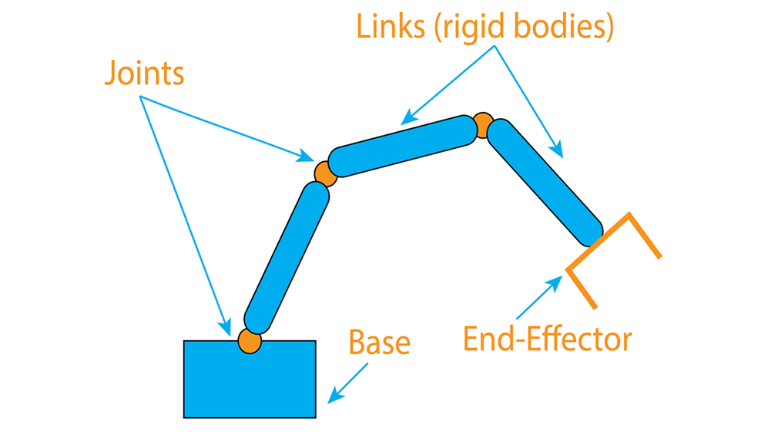
Robotic Manipulators
Learn the concepts of robot arm motion through coordinate system transformations, DH parameters, and forward/inverse kinematics.