checkCollision
Syntax
Description
collisionStatus = checkCollision(geom1,geom2)geom1
and geom2. If the two geometries are in collision at their specified
poses, collisionStatus is 1. If the function does
not find a collision, collisionStatus is 0.
[
returns the minimal distance collisionStatus,sepdist,witnesspts] = checkCollision(geom1,geom2)sepdist and witness points
witnesspts of each geometry when the function does not find a
collision between the two geometries.
Examples
Check Geometry Collision Status
This example shows how to check the collision status of two collision geometries.
Create a box collision geometry.
bx = collisionBox(1,2,3);
Create a cylinder collision geometry.
cy = collisionCylinder(3,1);
Translate the cylinder along the x-axis by 2.
T = trvec2tform([2 0 0]); cy.Pose = T;
Plot the two geometries.
show(cy) hold on show(bx) xlim([-5 5]) ylim([-5 5]) zlim([-5 5]) hold off
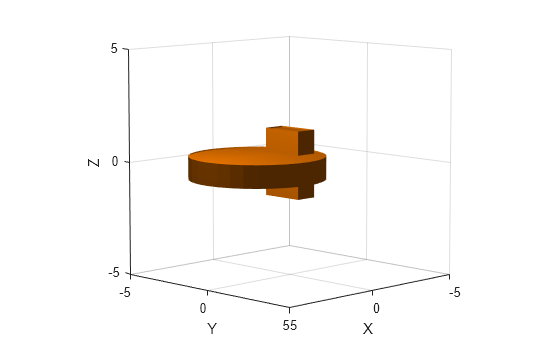
Check the collision status. Confirm the status is consistent with the plot.
[areIntersecting,dist,witnessPoints] = checkCollision(bx,cy)
areIntersecting = 1
dist = NaN
witnessPoints = 3×2
NaN NaN
NaN NaN
NaN NaN
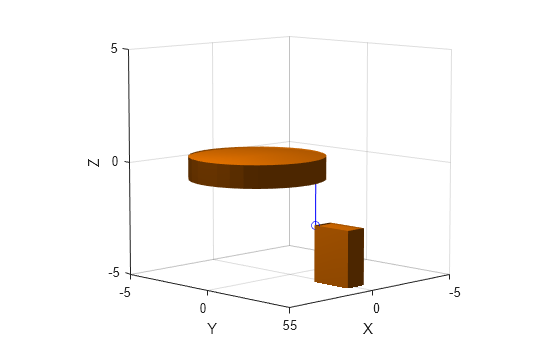
Translate the box along the x-axis by 3 and down the z-axis by 4. Confirm the box and cylinder are not colliding.
T = trvec2tform([0 3 -4]); bx.Pose = T; [areIntersecting,dist,witnessPoints] = checkCollision(bx,cy)
areIntersecting = 0
dist = 2
witnessPoints = 3×2
0.4286 0.4286
2.0000 2.0000
-2.5000 -0.5000
Plot the box, cylinder, and the line segment representing the minimum distance between the two geometries.
show(cy) hold on show(bx) wp = witnessPoints; plot3([wp(1,1) wp(1,2)], [wp(2,1) wp(2,2)], [wp(3,1) wp(3,2)], 'bo-') xlim([-5 5]) ylim([-5 5]) zlim([-5 5]) hold off
Check Collision Between Collision Capsules
Create two collision capsules. Center one at the origin, and set the pose of the other capsule to 3 meters away from the origin on the y-axis. Display the capsules.
cc1 = collisionCapsule(1,4); cc2 = collisionCapsule(1,4); cc2.Pose = trvec2tform([0 3 0]); show(cc1); hold on show(cc2); axis auto hold off
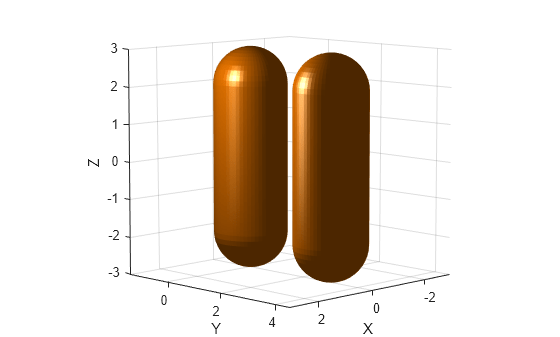
Check for collision between the two collision capsules. Because they are not visually colliding, the function should return real-valued separation distances and witness points. Display the separation distances and witness points.
[isColliding,separationDist,witnessPts] = checkCollision(cc1,cc2);
disp("Separation Distance: " + num2str(separationDist))Separation Distance: 1
disp("Capsule 1 Witness Point (X Y Z): " + num2str(witnessPts(:,1)'))Capsule 1 Witness Point (X Y Z): 0 1 -2
disp("Capsule 2 Witness Point (X Y Z): " + num2str(witnessPts(:,2)'))Capsule 2 Witness Point (X Y Z): 0 2 -2
Rotate the second capsule 90 degrees on the z-axis.
cc2.Pose(1:3,1:3) = eul2rotm([0 0 pi/2]); show(cc1); hold on show(cc2); axis auto
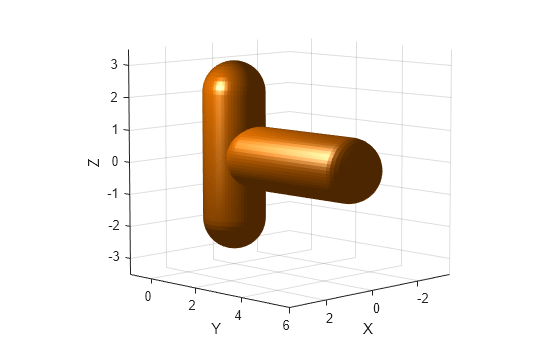
Check again for collision between the capsules. Because they are in collision, the function returns the separation distance and witness points as NaN.
[isColliding,separationDist,witnessPts] = checkCollision(cc1,cc2);
disp("Separation Distance: " + num2str(separationDist))Separation Distance: NaN
disp("Capsule 1 Witness Point (X Y Z): " + num2str(witnessPts(:,1)'))Capsule 1 Witness Point (X Y Z): NaN NaN NaN
disp("Capsule 2 Witness Point (X Y Z): " + num2str(witnessPts(:,2)'))Capsule 2 Witness Point (X Y Z): NaN NaN NaN
Input Arguments
Output Arguments
Limitations
Collision checking results are unreliable when the minimal distance is below 10-5 m.
References
[1] Gilbert, E.G., D.W. Johnson, and S.S. Keerthi. "A fast procedure for computing the distance between complex objects in three-dimensional space." IEEE Journal on Robotics and Automation 4, no. 2 (April 1988): 193–203. https://doi.org/10.1109/56.2083.
Extended Capabilities
Version History
Introduced in R2019b
See Also
collisionBox | collisionCapsule | collisionCylinder | collisionMesh | collisionSphere
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)