checkCollision
Check if robot is in collision
Syntax
Description
[
checks if the specified rigid body tree robot model isSelfColliding,selfSeparationDist,selfWitnessPts] = checkCollision(robot,config)robot is in
self-collision at the specified configuration config. Add collision
objects to the rigid body tree robot model using the addCollision function. The checkCollision function also
returns the closest separation distance selfSeparationDist and the
witness points selfWitnessPts as points on each body.
The function ignores adjacent bodies when checking for self-collisions.
[
checks if the specified rigid body tree robot model is in collision with itself or a
specified set of collision objects in the world isColliding,separationDist,witnessPts] = checkCollision(robot,config,worldObjects)worldObjects.
[___] = checkCollision(___,
specifies additional options using one or more name-value pair arguments in addition to
any of argument combinations from previous syntaxes.Name,Value)
Examples
Load a robot model and modify the collision meshes. Clear existing collision meshes, add simple collision object primitives, and check whether certain configurations are in collision.
Load Robot Model
Load a preconfigured robot model into the workspace using the loadrobot function. This model already has collision meshes specified for each body. Iterate through all the rigid body elements and clear the existing collision meshes. Confirm that the existing meshes are gone.
robot = loadrobot("kukaIiwa7",DataFormat="column"); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,Collisions="on",Visuals="off");
Add Collision Cylinders
Iteratively add a blue collision cylinder to each body and set the transparency to opaque. Skip some bodies for this specific model, as they overlap and always collide with the end effector (body 10).
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i}, collisionObj, FaceColor=[0 0 1], FaceAlpha=1) end end show(robot,Collisions="on",Visuals="off");
Check for Collisions
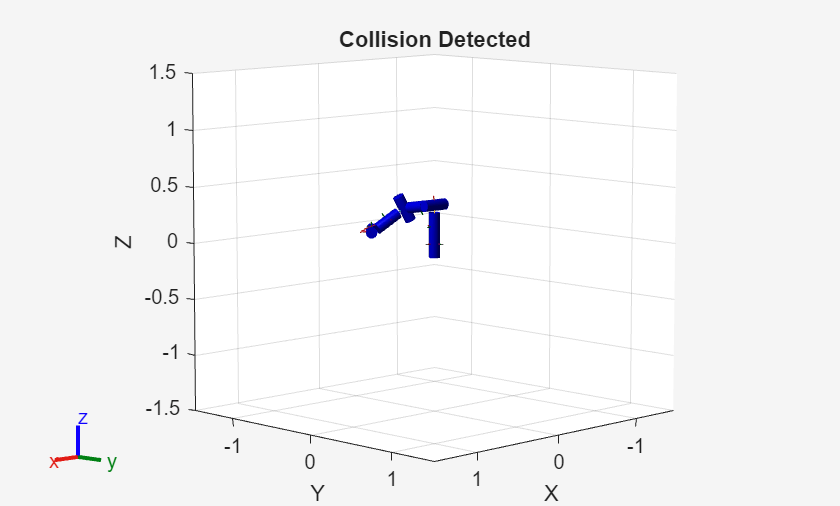
Generate a series of random configurations. Check whether the robot is in collision at each configuration. Visualize each configuration that has a collision.
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config,SkippedSelfCollisions="parent"); if isColliding show(robot,config,Collisions="on",Visuals="off"); title("Collision Detected") else % Skip non-collisions. end end
This example shows how to change which rigid body pairs are skipped during self-collision checking in rigid body trees using the SkippedSelfCollisions name-value argument for checkCollision.
Serial Manipulator Robot
Load a serial manipulator robot represented as a two joint rigid body tree. Since this robot does not have collision geometries, add some primitive collision geometries.
rbt2j = twoJointRigidBodyTree; P = [0.05 0.45]; % Geometry parameters for capsules T = trvec2tform([0.2 0 0]) * eul2tform([0 pi/2 0],"XYZ"); % Transformation parameters for capsules addCollision(rbt2j.Base,"cylinder",[0.075 0.1],trvec2tform([0 0 0.05])) addCollision(rbt2j.Bodies{1},"capsule",P,T) addCollision(rbt2j.Bodies{2},"capsule",P,T) addCollision(rbt2j.Bodies{3},"box",[0.2 0.05 0.2])
Visualize the robot with collisions on.
show(rbt2j,homeConfiguration(rbt2j),Collisions="on");
By default, SkippedSelfCollisions is "parent", so self-collision checking skips collisions between parent and child bodies. Check the parent and child bodies of body2.
body2 = rbt2j.Bodies{2};
rbt2j.BodyNamesans = 1×3 cell
{'body1'} {'body2'} {'tool'}
body2.Parent.Name
ans = 'body1'
body2.Children{1}.Nameans = 'tool'
This means that "body2" is not checked for collisions against "body1" or "tool".
List the body names of the robot. This shows that in the cell array, "body2", which is stored at index 2, is adjacent to both "body1" at index 1 and "tool" at index 3. Because the skipped collision pairs have not changed, the SkippedSelfCollisions name-value argument has no effect on the self-collision checking result for this robot.
rbt2j.BodyNames
ans = 1×3 cell
{'body1'} {'body2'} {'tool'}
Run collision checking with both SkippedSelfCollisions options to verify that the SkippedSelfCollisions name-value argument returns the same result for this robot.
checkCollision(rbt2j,homeConfiguration(rbt2j),SkippedSelfCollisions="parent")ans = logical
0
checkCollision(rbt2j,homeConfiguration(rbt2j),SkippedSelfCollisions="adjacent")ans = logical
0
Parallel Manipulator Robot
Use the exampleHelperCreate2ArmRBT example helper to create a parallel robot comprised of two one-joint arms.
rbt2arm = exampleHelperCreate2ArmRBT; show(rbt2arm,homeConfiguration(rbt2arm),Collisions="on"); axis padded
List the body names of the robot. The skipped body pairs formed by bodies of adjacent indices is similar to the serial manipulator but without body, "tool".
rbt2arm.BodyNames
ans = 1×2 cell
{'body1'} {'body2'}
Check the parent of body1 and the parent of body2. Each body forms a parent-child relationship with the base, even though they are at adjacent indices.
rbt2arm.Bodies{1}.Parent.Nameans = 'base'
rbt2arm.Bodies{2}.Parent.Nameans = 'base'
Run collision checking with both SkippedSelfCollisions options.
checkCollision(rbt2arm,homeConfiguration(rbt2arm),SkippedSelfCollisions="parent")ans = logical
0
checkCollision(rbt2arm,homeConfiguration(rbt2arm),SkippedSelfCollisions="adjacent")ans = logical
1
As expected, when skipping parent-child body pairs during self collision checks, checkCollision finds no self collisions, but does find a self collision between the "base" and "body2" when skipping body pairs of adjacent indices.
When you want to resolve all self-collisions in a robot model without checking them between bodies with a parent-child relationship or at adjacent indices, you can use the SkippedSelfCollisions name-value argument with the "parent" and "adjacent" values, respectively. However, if your robot model has one or more self-collisions that you can not resolve when using either "parent" or "adjacent", you can specify additional body pairs between which to skip collision checking.
Load an ABB IRB 1600 robot model into the workspace, with a data format of "row". This is an example of a robot model that contains an additional self-collision when you specify the SkippedSelfCollision name-value argument as "adjacent".
rbt = loadrobot("abbIrb1600",DataFormat="row"); config = homeConfiguration(rbt)
config = 1×6
0 0 0 0 0 0
Perform an exhaustive self-collision check, and skip self-collisions between bodies at adjacent indices
[isSelfColl1,sepDist1] = checkCollision(rbt,config,SkippedSelfCollisions="adjacent",Exhaustive="on");
You can determine which pairs of bodies are in collision by checking the separation distance matrix sepDist1 for NaN values. To make the separation distance matrix easier to read, convert the separation distance matrix to a table. Use the body names and base link name to label the rows and columns. The NaN values indicate that the self-collision is between link_4 and link_6..
bodynames = [rbt.BodyNames rbt.Base.Name]; collTable = array2table(sepDist1,VariableNames=bodynames,RowNames=bodynames)
collTable=8×8 table
link_1 link_2 link_3 link_4 link_5 link_6 tool0 base_link
_______ _______ _______ _______ _______ _______ _____ _________
link_1 Inf Inf 0.176 0.36201 0.55837 0.59557 Inf Inf
link_2 Inf Inf Inf 0.25321 0.49887 0.54104 Inf 0.25599
link_3 0.176 Inf Inf Inf 0.244 0.286 Inf 0.65488
link_4 0.36201 0.25321 Inf Inf Inf NaN Inf 0.7801
link_5 0.55837 0.49887 0.244 Inf Inf Inf Inf 0.91534
link_6 0.59557 0.54104 0.286 NaN Inf Inf Inf 0.95033
tool0 Inf Inf Inf Inf Inf Inf Inf Inf
base_link Inf 0.25599 0.65488 0.7801 0.91534 0.95033 Inf Inf
Check the value of isSelfColl1. The output argument returns 1 (true), indicating that the robot model has a self-collision between a pair of bodies that are not adjacent.
isSelfColl1
isSelfColl1 = logical
1
To skip checking for self-collision between link_4 and link_6, you must manually specify all of the body pairs for which to skip checking for self-collision. First, create a list of all the body names in the model, in order from the base link to the tool. Then, by combining the ordered list of rigid body names with an offset version of itself, create a two-column cell array that specifies each adjacent rigid body pair. Then add link_4 and link_6 as an additional skipped body pair.
adjbodynames = [rbt.Base.Name rbt.BodyNames]
adjbodynames = 1×8 cell
{'base_link'} {'link_1'} {'link_2'} {'link_3'} {'link_4'} {'link_5'} {'link_6'} {'tool0'}
skiplist = cell(rbt.NumBodies,2); for i = 1:rbt.NumBodies skiplist(i,:) = {adjbodynames{i}, adjbodynames{i+1}}; end skiplist = [skiplist; {'link_4','link_6'}]
skiplist = 8×2 cell
{'base_link'} {'link_1'}
{'link_1' } {'link_2'}
{'link_2' } {'link_3'}
{'link_3' } {'link_4'}
{'link_4' } {'link_5'}
{'link_5' } {'link_6'}
{'link_6' } {'tool0' }
{'link_4' } {'link_6'}
Perform self-collision checking, and note that checkCollision no longer indicates self-collision between link_4 and link_6.
[isSelfColl2,sepDist2] = checkCollision(rbt,config,SkippedSelfCollisions=skiplist,Exhaustive="on");
isSelfColl2isSelfColl2 = logical
0
array2table(sepDist2,VariableNames=bodynames,RowNames=bodynames)
ans=8×8 table
link_1 link_2 link_3 link_4 link_5 link_6 tool0 base_link
_______ _______ _______ _______ _______ _______ _____ _________
link_1 Inf Inf 0.176 0.36201 0.55837 0.59557 Inf Inf
link_2 Inf Inf Inf 0.25321 0.49887 0.54104 Inf 0.25599
link_3 0.176 Inf Inf Inf 0.244 0.286 Inf 0.65488
link_4 0.36201 0.25321 Inf Inf Inf Inf Inf 0.7801
link_5 0.55837 0.49887 0.244 Inf Inf Inf Inf 0.91534
link_6 0.59557 0.54104 0.286 Inf Inf Inf Inf 0.95033
tool0 Inf Inf Inf Inf Inf Inf Inf Inf
base_link Inf 0.25599 0.65488 0.7801 0.91534 0.95033 Inf Inf
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The
checkCollisionobject function assumes all meshes on the rigid body tree to be convex during collision checking. You can visualize the shape of the convex hull using theshowobject function with theCollisionsname-value argument set to"on".