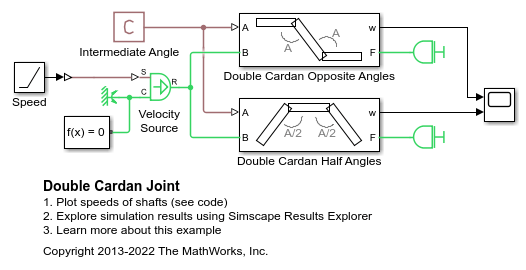
Double Cardan Joint
This example shows two methods to create a constant rotational velocity output using universal joints. In the first method, the angle of the universal joints is exactly opposite. The output shaft axis is parallel to the input shaft axis, but offset by some distance.
In the second method, the axes of the input and output shafts are offset by a specified angle. The angle of each universal joint is half of the angular offset of the input and output axes.
Note that the output rotational velocity can vary from the input due to compliance in the joints. Stiffer compliance can result in more accurate tracking, but higher internal torques and vibrations.
Model
Double Cardan Opposite Angles Subsystem
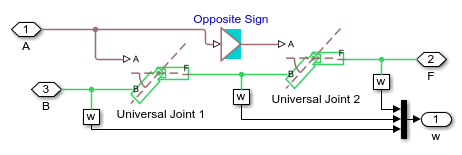
Double Cardan Half Angles Subsystem

Simulation Results from Simscape Logging
The plots below show the shaft speeds in double Cardan joints. In each case, the output and input shaft speeds are identical. The intermediate shaft speed varies with the rotational angle of the shaft.
