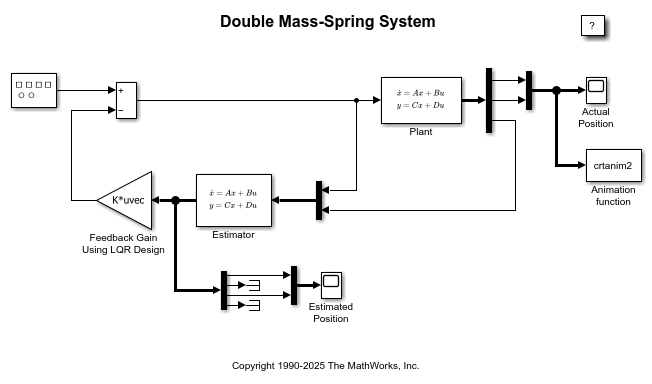
Double Spring-Mass System
This example shows how to model a double spring-mass system with a periodically varying forcing function. The model uses State-Space blocks to represent the plant and estimator, and a Level-2 MATLAB S-Function block to animate the mass system during simulation. The sensor and actuator are attached to the left mass. The example uses state estimation and linear-quadratic regulator (LQR) control.
See Also
Topics
- Design LQR Servo Controller in Simulink (Control System Toolbox)
- Double Mass-Spring-Damper in Simulink and Simscape (Simscape)