Timed-Based Linearization
Generate linear models in base workspace at specific times
Libraries:
Simulink /
Model-Wide Utilities
Description
This block calls linmod or dlinmod to create a linear model for the system when the simulation
clock reaches the time specified by the Linearization
time parameter. No trimming is performed. The linear model is stored in
the base workspace as a structure, along with information about the operating point at
which the snapshot was taken. Multiple snapshots are appended to form an array of
structures.
Note
linmod and dlinmod provide only basic
linearization functionality. For full linearization functionality, use Simulink®
Control Design™ software. For more information, see Choose Linearization Tools (Simulink Control Design).
The block sets the following model parameters to the indicated values:
BufferReuse = 'off'BlockReductionOpt = 'off'
The name of the structure used to save the snapshots is the name of the model appended
by _Timed_Based_Linearization, for example,
vdp_Timed_Based_Linearization. The structure has the following
fields:
| Field | Description |
|---|---|
| The A matrix of the linearization |
| The B matrix of the linearization |
| The C matrix of the linearization |
| The D matrix of the linearization |
| Names of the model's states |
| Names of the model's output ports |
| Names of the model's input ports |
| A structure that specifies the operating point of the
linearization. The structure specifies the operating point time
( |
| The sample time of the linearization for a discrete linearization |
Tip
To generate models conditionally, use the Trigger-Based Linearization block.
Examples
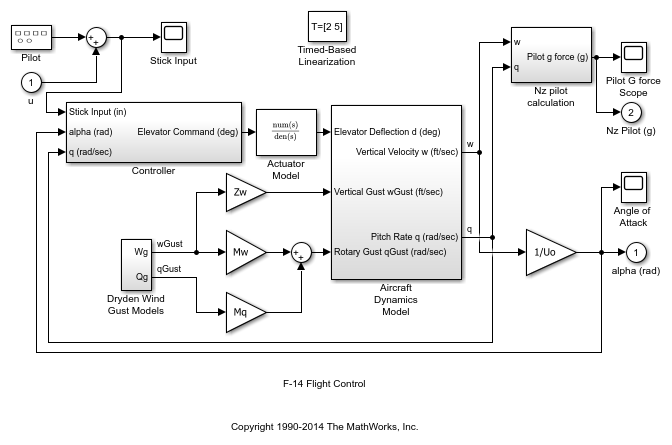
This example shows how to use the Timed-Based Linearization block to generate linear models at predetermined times.
In this model, the Linearization time of the Timed-Based Linearization block is set to [2 5]. On the Data Import/Export pane of the Model Configuration Parameters dialog box, the States and Time check boxes are selected. These settings enable you to get the states of the model at the simulation times of 2 and 5 seconds.
After simulating the model, the following variables appear in the MATLAB® workspace:
ex_f14_linearization_Timed_Based_Linearization
tout
xout
To get the indices to the operating point times, execute the following command:
ind1 = find(ex_f14_linearization_Timed_Based_Linearization(1).OperPoint.t==tout);
To get the state vectors at the operating points, execute the following command:
ind2 = find(ex_f14_linearization_Timed_Based_Linearization(1).OperPoint.t==tout);
Parameters
Block Characteristics
Data Types | |
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Version History
Introduced in R2010a