Map Root Inport Signal Data
To import, visualize, and map signal and bus data to root-level input ports, use the Root
Inport Mapper tool or the getRootInportMap function. At the top level of a
model or referenced model, root-level input ports include:
Inport blocks
Enable blocks
Trigger blocks
Root-level input ports import data from the MATLAB® workspace based on the value of the Configuration Parameters > Data Import/Export > Input parameter.
Root-level inport mapping imports signal data in a way that meets most modeling requirements and maintains model flexibility. You can:
Test your model with signals from the workspace and use your model as a referenced model in a larger context without any modification.
Update the Input parameter based on the signal data you import and map to root-level inports.
Visually inspect signal data without loading all the data into MATLAB memory.
Tip
To determine whether another data import technique meets your specific modeling requirements (such as the amount of data or the storage location) better, see Comparison of Signal Loading Techniques.
Command-Line Interface
You can use the getRootInportMapgetSlRootInportMap
Import and Mapping Workflow
Map the imported signal data. For example, you can map the signal data by block path or signal name.
Simulate the model using the mapped data. After associating a scenario with the model, you can generate scripts for simulation with scenarios to perform batch simulations.
Optionally, save the current Root Inport Mapper scenario for future reference or to share with other people.
Tip
To extend the Root Inport Mapper tool map modes, you can create a custom mapping file function to map data to root-level inports.
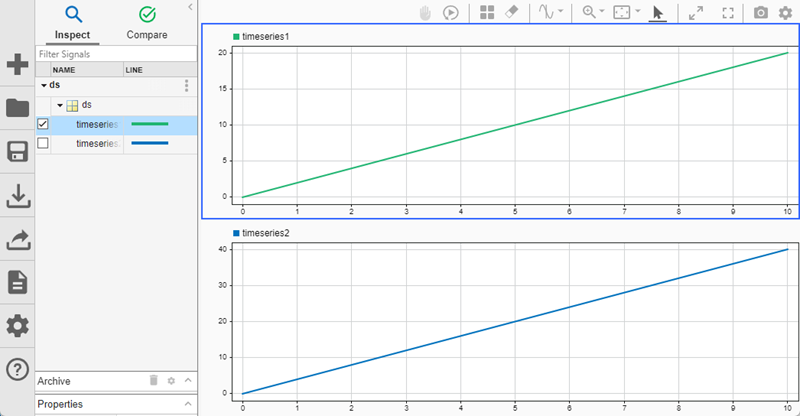
View and Inspect Signal Data
After you import signal or bus data, you can view and inspect signal data using tools such as:
For example, to view input signal or bus data with the Signal Editor or Simulation Data Inspector windows.
For
Simulink.SimulationData.DatasetorSimulink.SimulationData.DatasetRefelements, use theplotfunction on the dataset.By default, the plot opens with the Simulation Data Inspector.
To use the Signal Editor window, use the
'preview'option with theplotfunction.
In the Signal Editor window, explore the plots using the Measure and Zoom & Pan sections on the toolbar.
In the Measure section, use the Data Cursors button to display one or two cursors for the plot. These cursors display the T and Y values of a data point in the plot. To view a data point, click a point on the plot line.
In the Zoom & Pan section, select how you want to zoom and pan the signal plots. Zooming is only for the selected axis.
For a summary of the other steps involved in using the Root Inport Mapper tool, see Import and Mapping Workflow.