Call MATLAB Function Files in MATLAB Function Blocks
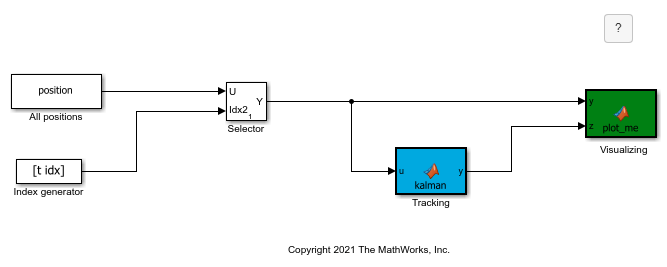
The example model uses a MATLAB Function block to estimate the location of a moving object by calling a MATLAB® function file on the path. The model then plots this prediction data against the actual location of the object with another MATLAB Function block. The example then allows you to generate code from the MATLAB Function block that calls the MATLAB function file.
Simulate the Model
The model takes the position data of an object stored in a MAT file and runs the data through a tracking algorithm. The MATLAB Function block labeled Tracking calls a separate MATLAB function file, ex_kalman_f.m, to execute the tracking algorithm. In the model, double-click the Tracking block to see the code that calls ex_kalman_f.m.
function y = kalman(u) y = ex_kalman_f(u); end
Open ex_kalman_f.m to view the algorithm. ex_kalman_f.m uses a Kalman filter algorithm to track the location of the object. The algorithm uses two persistent variables. x_est stores the state between time steps and p_ext stores the covariance. The algorithm uses these persistent variables to calculate the estimated location of the object at every time step as the output y.
function y = ex_kalman_f(z) %#codegen
% Initialize state transition matrix dt = 1; A = [ 1 0 dt 0 0 0;... 0 1 0 dt 0 0;... 0 0 1 0 dt 0;... 0 0 0 1 0 dt;... 0 0 0 0 1 0 ;... 0 0 0 0 0 1 ];
% Measurement matrix
H = [ 1 0 0 0 0 0; 0 1 0 0 0 0 ];
Q = eye(6);
R = 1000 * eye(2);
% Initial conditions persistent x_est p_est if isempty(x_est) x_est = zeros(6, 1); p_est = zeros(6, 6); end % Predicted state and covariance x_prd = A * x_est; p_prd = A * p_est * A' + Q;
% Estimation
S = H * p_prd' * H' + R;
B = H * p_prd';
klm_gain = (S \ B)';
% Estimated state and covariance
x_est = x_prd + klm_gain * (z - H * x_prd);
p_est = p_prd - klm_gain * H * p_prd;
% Compute the estimated measurements y = H * x_est; end
MATLAB Function block code, and the function files the block calls, must be supported for code generation. Unlike the MATLAB Function block, MATLAB files called by the MATLAB Function block require the %#codegen directive to find code violations that would result in errors during code generation. In this example, ex_kalman_f.m does not have any violations.
After Simulink® calculates the estimated location of the object, the Visualizing block plots the actual and estimated locations of the object by using the MATLAB plot function.
function plot_me(y,z)
persistent h if isempty(h) h = figure; hold; end
N = size(z,2); title("Trajectory of object [blue] its Kalman estimate[green]"); xlabel("horizontal position"); ylabel("vertical position");
for i = 1:N plot(y(1,i), y(2,i), "bx-"); plot(z(1,i), z(2,i), "go-"); axis([-1.1, 1.1, -1.1, 1.1]); pause(0.02); end end
Run the model to watch the data during simulation.
![]()
Limitations
The simulation time in this model must match the size of the position data array. If the input data size changes, you must manually adjust the simulation time.
This model can only estimate the location of a moving point. For more sophisticated motion estimation capabilities, consider using Computer Vision Toolbox.
You cannot call the function of a MATLAB Function block elsewhere, including in the code of the block that defines the function or other MATLAB Function blocks. For example, if the function of a MATLAB Function block is named
fooand contains a call to a functionfooin its body, the block function does not make a recursive call to itself, but attempts to find and callfoo.min the current folder or on the path.If you have a license for Embedded Coder® or Simulink Coder™, you can only generate C code from MATLAB Function blocks that do not include extrinsic functions. In this example, the
Visualizingblock includesplotandfigure, which MATLAB treats as extrinsic functions. For more information, see Use MATLAB Engine to Execute a Function Call in Generated Code (MATLAB Coder).
See Also
Topics
- Run Simulations and Generate Code with Masked Library Subsystems Containing MATLAB Function Blocks
- Spiral Galaxy Formation Simulation Using MATLAB Function Blocks
- Implement MATLAB Functions in Simulink with MATLAB Function Blocks
- When to Generate Code from MATLAB Algorithms
- Functions and Objects Supported for C/C++ Code Generation
- Get Started with Simulink Coder (Simulink Coder)
- Generate Code for Variable-Size Arrays (MATLAB Coder)