Constant Radius Maneuver
This reference application represents a full vehicle dynamics model undergoing a constant radius test maneuver. For information about similar maneuvers, see standards SAE J266_199601[4] and ISO 4138:2012[5]. You can create your own versions, establishing a framework to test that your vehicle meets the design requirements under normal and extreme driving conditions. Use this reference application in ride and handling studies and chassis controls development to characterize the steering and lateral vehicle dynamics.
You can configure the reference application for open-loop and closed-loop tests:
Open-loop — Maintain the target velocity and steering wheel angle to determine the lateral acceleration, side-slip characteristics, and steering angles for specific accelerations and subsequent test maneuvers. For the open-loop test, set the Reference Generator block Maneuver parameter to
Increasing Steer.Closed-loop — Use the predictive driver to maintain a prespecified turn radius at different velocities for drivability and handling performance studies. For the closed-loop test, set the Reference Generator block Maneuver parameter to
Constant radius.
To create and open a working copy of the constant radius reference application, enter
This table summarizes the blocks and subsystems in the reference application. Some subsystems contain variants.
| Reference Application Element | Description | Variants |
|---|---|---|
Sets the parameters that configure the maneuver and 3D visualization environment. By default, the block is set for the constant radius maneuver with the 3D simulation engine environment disabled. For the minimum 3D visualization environment hardware requirements, see Unreal Engine Simulation Environment Requirements and Limitations. To enable 3D visualization, on the 3D Engine tab, select Enabled. | ✓ | |
Implements the driver model that the reference application uses to generate acceleration, braking, gear, and steering commands. By default, Driver Commands subsystem variant is the Predictive Driver block. | ✓ | |
Implements wind and road forces. | ✓ | |
Implements controllers for engine control units (ECUs), transmissions, anti-lock braking systems (ABS), and active differentials. Note Some controllers implement Stateflow® logic. The reference application runs without Stateflow by default, but any logic modification requires Stateflow. | ✓ | |
Implements the:
| ✓ | |
Provides the vehicle trajectory and driver response. Note Simulating models in the 3D visualization environment requires Simulink® 3D Animation™. | ✓ |
To override the default variant, on the Modeling tab, in the Design section, click the drop-down. In the General section, select Variant Manager. In the Variant Manager, navigate to the variant that you want to use. Right-click and select Override using this Choice.
Reference Generator
The Reference Generator block sets the parameters that configure the maneuver and 3D simulation environment. By default, the block is set for the constant radius maneuver with the 3D simulation engine environment disabled.
Use the Maneuver parameter to specify the type of maneuver. You can specify the double lane change, swept sine, sine with dwell, and slowly increasing maneuvers.
If you select the Use maneuver-specific driver, initial position, and scene parameter, the reference application sets the driver, initial position, and scene for the maneuver that you specified.
For more information, see Reference Generator.
Driver Commands
The Driver Commands block implements the driver model that the reference application uses to generate acceleration, braking, gear, and steering commands. By default, if you select the Reference Generator block parameter Use maneuver-specific driver, initial position, and scene, the reference application selects the driver for the maneuver that you specified.
Vehicle Command Mode Setting | Implementation |
|---|---|
| Longitudinal Driver block — Longitudinal speed-tracking controller. Based on reference and feedback velocities, the block generates normalized acceleration and braking commands that can vary from 0 through 1. Use the block to model the dynamic response of a driver or to generate the commands necessary to track a longitudinal drive cycle. |
| Predictive Driver block — Controller that generates normalized steering, acceleration, and braking commands to track longitudinal velocity and a lateral reference displacement. The normalized commands can vary between -1 to 1. The controller uses a single-track (bicycle) model for optimal single-point preview control. |
| Predictive Driver block — Controller that generates normalized steering, acceleration, and braking commands to track longitudinal velocity and a lateral reference displacement. The normalized commands can vary between -1 to 1.
|
| Implements an open-loop system so that you can configure the reference application for constant or signal-based steering, acceleration, braking, and gear command input. |
Environment
The Environment subsystem generates the wind and ground forces. The reference application has these environment variants.
| Environment | Variant | Description |
|---|---|---|
Ground Feedback |
| Uses Simulation 3D Terrain Sensor block to implement a multipoint terrain sensor in 3D environment |
| Implements a constant friction value |
Controllers
The Controllers subsystem generates engine torque, transmission gear, brake pressure, and differential pressure commands.
ECU
The ECU controller generates the engine torque command. The controller prevents
over-revving the engine by limiting the engine torque command to the value specified by
model workspace variable EngRevLim. By default, the value is 7000
rpm. If the differential torque command exceeds the limited engine torque command, the
ECU sets the engine torque command to the commanded differential torque.
Transmission Control
The Transmission Controller subsystem generates the transmission gear command. The controller includes these variants.
| Variant | Description |
|---|---|
| Open loop transmission control. The controller sets the gear command to the gear request. |
| Implements a transmission control module (TCM) that uses Stateflow logic to generate the gear command based on the vehicle acceleration, brake command, wheel speed, engine speed, and gear request. |
| Implements a paddle controller that uses the vehicle acceleration and engine speed to generate the gear command. |
Brake Pressure Control
The Brake Controller subsystem implements a Brake Pressure Control subsystem to generate the brake pressure command. The Brake Pressure Control subsystem has these variants.
| Variant | Description |
|---|---|
| Implements an anti-lock braking system (ABS) feedback controller that switches between two states to regulate wheel slip. The bang-bang control minimizes the error between the actual slip and desired slip. For the desired slip, the controller uses the slip value at which the mu-slip curve reaches a peak value. This desired slip value is optimal for minimum braking distance. |
| Open loop brake control. The controller sets the brake pressure command to a reference brake pressure based on the brake command. |
| Slip control ABS control when you simulate the maneuver.1,2,3 The slip control ABS controller uses logic-switching based on wheel deceleration and vehicle acceleration to control the braking pressure at each wheel. Consider using slip control ABS control to prevent wheel lock-up, decrease braking distance, or maintain yaw stability during the maneuver. The default ABS parameters are set to work on roads that have a constant friction coefficient scaling factor of 0.6. |
Active Differential Control
The Active Differential Control subsystem generates the differential pressure command. To calculate the command, the subsystem has these variants.
| Variant | Description |
|---|---|
| Implements a controller that generates the differential pressure command based on the:
|
| Does not implement a controller. Sets the differential pressure command to 0. |
Passenger Vehicle
The Passenger Vehicle subsystem has an engine, controllers, and a vehicle body with four wheels. Specifically, the vehicle contains these subsystems.
| Body, Suspension, Wheels Subsystem | Variant | Description |
|---|---|---|
PassVeh7DOF |
| Vehicle with four wheels:
Subsystem has variants for the tires, including:
|
PassVeh14DOF |
| Vehicle with four wheels.
Subsystem has variants for the suspension, including:
Subsystem has variants for the tires, including:
|
| Engine Subsystem | Variant | Description |
|---|---|---|
Mapped Engine |
| Mapped spark-ignition (SI) engine |
Steering, Transmission, Driveline, and Brakes Subsystem | Variant | Description | |
|---|---|---|---|
Driveline Ideal Fixed Gear | Driveline model | All Wheel Drive | Configure the driveline for all-wheel, front-wheel, rear-wheel, or rear-wheel active differential drive and specify the type of torque coupling. |
| |||
| |||
| |||
Transmission |
| Implements an ideal fixed gear transmission. | |
Brake Hydraulics | NA | Implements the heuristic response of a hydraulic system when the controller applies a brake command to a cylinder. Includes front and rear wheel bias coefficients. The subsystem converts the applied pressure to a cylinder spool position. To generate the brake pressure, the spool applies a flow downstream to the cylinders. | |
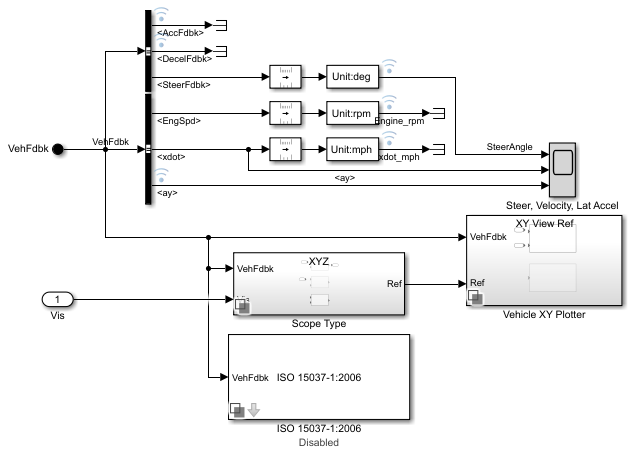
Visualization
When you run the simulation, the Visualization subsystem provides driver, vehicle, and response information. The reference application logs vehicle signals during the maneuver, including steering, vehicle and engine speed, and lateral acceleration. You can use the Simulation Data Inspector to import the logged signals and examine the data.
| Element | Description |
|---|---|
Driver Commands | Driver commands:
|
Vehicle Response | Vehicle response:
|
Steer, Velocity, Lat Accel Scope block |
|
Vehicle XY Plotter | Vehicle longitudinal versus lateral distance |
ISO 15037-1:2006 block | Display ISO standard measurement signals in the Simulation Data Inspector, including steering wheel angle and torque, longitudinal and lateral velocity, and sideslip angle |
If you enable 3D visualization on the Reference Generator block 3D Engine tab by selecting Enabled, you can view the vehicle response in the Simulation 3D Viewer.
Note
Simulating models in the 3D visualization environment requires Simulink 3D Animation.
To smoothly change the camera views, use these keyboard shortcuts.
| Keyboard Shortcut | Camera View | |
|---|---|---|
1 | Back left |
|
2 | Back | |
3 | Back right | |
4 | Left | |
5 | Internal | |
6 | Right | |
7 | Front left | |
8 | Front | |
9 | Front right | |
0 | Overhead | |

For additional camera controls, use these keyboard shortcuts.
| Keyboard Shortcut | Camera Control |
|---|---|
| Tab | Cycle the view between all vehicles in the scene. |
Scroll wheel | Control the camera distance from the vehicle. |
L | Toggle a camera lag effect on or off. When you enable the lag effect, the camera view includes:
This lag improves visualization of overall vehicle acceleration and rotation. |
| F | Toggle the free camera mode on or off. When you enable the free camera mode, you can use the pointer to change the pitch and yaw of the camera. This mode allows you to orbit the camera around the vehicle. |

References
[1] Pasillas-Lépine, William. "Hybrid modeling and limit cycle analysis for a class of five-phase anti-lock brake algorithms." Vehicle System Dynamics 44, no. 2 (2006): 173-188.
[2] Gerard, Mathieu, William Pasillas-Lépine, Edwin De Vries, and Michel Verhaegen. "Improvements to a five-phase ABS algorithm for experimental validation." Vehicle System Dynamics 50, no. 10 (2012): 1585-1611.
[3] Bosch, R. "Bosch Automotive Handbook." 10th ed. Warrendale, PA: SAE International, 2018.
[4] J266_199601. Steady-State Directional Control Test Procedures for Passenger Cars and Light Trucks. Warrendale, PA: SAE International, 1996.
[5] ISO 4138:2012. Passenger cars — Steady-state circular driving behaviour — Open-loop test methods. Geneva: ISO, 2012.
See Also
3D Engine | Driver Commands | Reference Generator | Simulation 3D Terrain Sensor