bboxPrecisionRecall
Compute bounding box precision and recall against ground truth
Syntax
Description
[
measures the accuracy of bounding box overlap between precision,recall] = bboxPrecisionRecall(bboxes,groundTruthBboxes)bboxes
and groundTruthBboxes. Precision is a
ratio of true positive instances to all positive instances of objects in the
detector, based on the ground truth. Recall is a ratio of
true positive instances to the sum of true positives and false negatives in the
detector, based on the ground truth.
If the bounding box is associated with a class label,
precision and recall contain metrics
for each class. If the bounding box is also associated with a confidence score for
ranking, use the evaluateObjectDetection function.
[
specifies the overlap threshold for assigning a given box to a ground truth
box.precision,recall] = bboxPrecisionRecall(bboxes,groundTruthBboxes,threshold)
Examples
Create two ground truth boxes.
groundTruthBoxes = [2 2 10 20; 80 80 30 40];
Create three boxes for evaluation.
boundingBoxes = [4 4 10 20; 50 50 30 10; 90 90 40 50];
Plot the boxes.
figure hold on for i=1:2 rectangle('Position',groundTruthBoxes(i,:),'EdgeColor','r'); end for i=1:3 rectangle('Position',boundingBoxes(i,:),'EdgeColor','b'); end
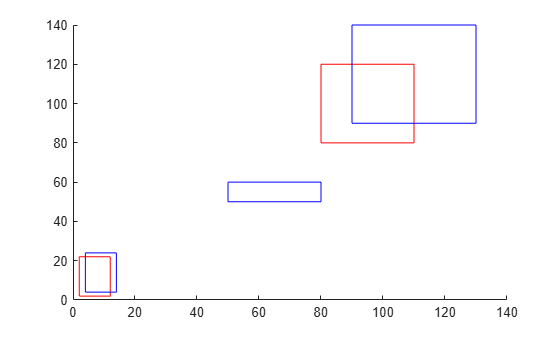
Evaluate the overlap accuracy against the ground truth data.
[precision,recall] = bboxPrecisionRecall(boundingBoxes,groundTruthBoxes)
precision = 0.3333
recall = 0.5000
Define class names.
classNames = ["A","B","C"];
Create bounding boxes for evaluation.
predictedLabels = {...
categorical("A",classNames); ...
categorical(["C";"B"],classNames)};
bboxes = {...
[10 10 20 30]; ...
[60 18 20 10; 120 120 5 10]};
boundingBoxes = table(bboxes,predictedLabels,'VariableNames',...
{'PredictedBoxes','PredictedLabels'});Create ground truth boxes.
A = {[10 10 20 28]; []};
B = {[]; [118 120 5 10]};
C = {[]; [59 19 20 10]};
groundTruthData = table(A,B,C);Evaluate overlap accuracy against ground truth data.
[precision,recall] = bboxPrecisionRecall(boundingBoxes,groundTruthData)
precision = 3×1
1
0
1
recall = 3×1
1
0
1
Input Arguments
Output Arguments
Version History
Introduced in R2018a