integralKernel
Define filter for use with integral images
Description
An integralKernel object describes box filters for use with
integral images.
Creation
Description
intKernel = integralKernel(bbox,weights) creates an upright box
filter from bounding boxes, bbox, and their corresponding weights,
weights. The bounding boxes set the BoundingBoxes
property and the weights set the Weights property.
For example, a conventional filter with the coefficients:

and two regions:
| region 1: x=1, y=1, width = 4, height = 2 |
| region 2: x=1, y=3, width = 4, height = 2 |
boxH = integralKernel([1 1 4 2; 1 3 4 2],[1, -1])
intKernel = integralKernel(bbox,weights,orientation) creates a
box filter with an upright or rotated orientation. The specified orientation sets the
Orientation property.
Properties
BoundingBoxes — Bounding boxes
4-element vector | M-by-4 matrix
Bounding boxes, specified as a 4-element vector of the form [x,y,width, height] representing a single bounding box or an M-by-4 matrix representing M bounding boxes. The bounding boxes define the filter. The (x,y) coordinates represent the top-most corner of the kernel. The (width, height) elements represent the width and height accordingly. Specifying the bounding boxes as an M-by-4 matrix is particularly useful for constructing Haar-like features composed of multiple rectangles.
Sums are computed over regions defined by BoundingBoxes. The
bounding boxes can overlap. See Define an 11-by-11 Average Filter for an example of how to specify a box filter.
Weights — Weights
numeric vector
Weights, specified as an M-element numeric vector containing a weight for each bounding box. The weights are used to define the coefficients of the filter.
Coefficients — Filter coefficients
numeric
Filter coefficients, specified as a numeric value.
Center — Filter center
[x,y] coordinates
Filter center, specified as [x,y] coordinates. The filter center represents the center of the bounding rectangle. It is calculated by halving the dimensions of the rectangle. For even dimensional rectangles, the center is placed at subpixel locations. Hence, it is rounded up to the next integer.
For example, for this filter, the center is at [3,3].
These coordinates are in the kernel space, where the top-left corner is
(1,1). To place the center in a different location, provide the appropriate bounding box
specification. For this filter, the best workflow would be to construct the upright
kernel and then call the rot45 method to provide the
rotated version.
Size — Filter size
2-element vector
Filter size, specified as a 2-element vector. The size of the kernel is computed to be the dimensions of the rectangle that bounds the kernel. For a single bounding box vector [x,y,width, height], the kernel is bounded within a rectangle of dimensions [(width+height) (width+height)-1].
For cascaded rectangles, the lowest corner of the bottom-most rectangle defines the size. For example, a filter with a bounding box specification of [3 1 3 3], with weights set to 1, produces a 6-by-5 filter with this kernel:
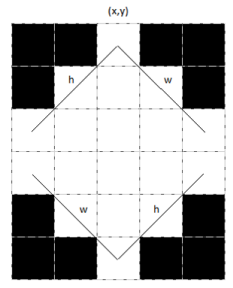
Orientation — Filter orientation
'upright' (default) | 'rotated'
Filter orientation, specified as 'upright' or
'rotated'. When you specify the orientation as
'rotated', the (x,y)
components refer to the location of the top-left corner of the bounding box. Also, the
(width,height) components refer to a 45-degree
line from the top-left corner of the bounding box.
Usage
Computing an Integral Image and Using it for Filtering with Box Filters
The integralImage function together with the
integralKernel object and integralFilter function complete the workflow for box filtering based on
integral images. You can use this workflow for filtering with box filters.
Use the
integralImagefunction to compute the integral imagesUse the
integralFilterfunction for filteringUse the
integralKernelobject to define box filters
The integralKernel object allows you to
transpose the filter. You can use this to aim a directional filter. For example, you can
turn a horizontal edge detector into vertical edge detector.
Object Functions
Examples
Define an 11-by-11 Average Filter
avgH = integralKernel([1 1 11 11], 1/11^2);
Define a Filter to Approximate a Gaussian Second Order Partial Derivative in Y Direction
ydH = integralKernel([1,1,5,9;1,4,5,3], [1, -3]);
You can also define this filter as integralKernel([1,1,5,3;1,4,5,3;1,7,5,3], [1, -2, 1]);|. This filter definition is less efficient because it requires three bounding boxes.
Visualize the filter.
ydH.Coefficients
ans = 9×5
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
-2 -2 -2 -2 -2
-2 -2 -2 -2 -2
-2 -2 -2 -2 -2
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
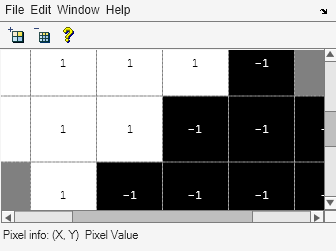
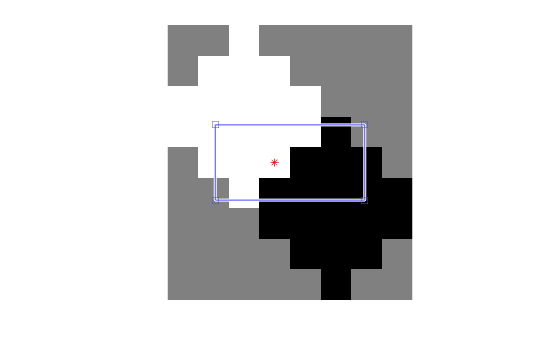
Create a Haar-like Wavelet to Detect 45-Degree Edges
Create the filter.
K = integralKernel([3,1,3,3;6 4 3 3], [1 -1], 'rotated');Visualize the filter and mark the center.
imshow(K.Coefficients, [], 'InitialMagnification', 'fit'); hold on; plot(K.Center(2),K.Center(1), 'r*'); impixelregion;
Blur an Image Using an Average Filter
Read and display the input image.
I = imread('pout.tif');
imshow(I);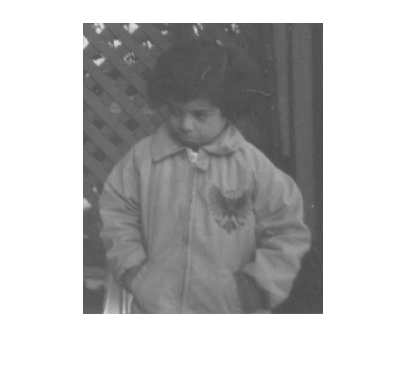
Compute the integral image.
intImage = integralImage(I);
Apply a 7-by-7 average filter.
avgH = integralKernel([1 1 7 7], 1/49); J = integralFilter(intImage, avgH);
Cast the result back to the same class as the input image.
J = uint8(J); figure imshow(J);
References
[1] Viola, Paul, and Michael J. Jones. “Rapid Object Detection using a Boosted Cascade of Simple Features”. Proceedings of the 2001 IEEE® Computer Society Conference on Computer Vision and Pattern Recognition. Vol. 1, 2001, pp. 511–518.
Version History
Introduced in R2012a
See Also
detectMSERFeatures | integralImage | integralFilter | detectSURFFeatures | SURFPoints
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)