Template Matching
Locate a template in an image

Libraries:
Computer Vision Toolbox /
Analysis & Enhancement
Description
The Template Matching block finds the best match of a template within an input image. The block computes match metric values by shifting a template over a region of interest or the entire image, and then finds the best match location.
The block outputs either the match metric values or the one-based (x,y) coordinates of the best template match. Optionally the block can output an N-by-N matrix of the match metric values centered around the best match location.
Examples

Find Location of Object in Image Using Template Matching
Read the reference image and the template image into the MATLAB® workspace.
Ports
Input
Output
Matrix of match metric values. The matrix of the match metrics always implements single-step exhaustive window iteration. Therefore, the block computes the metric values at every pixel.
Dependencies
When you set the Output parameter to Metric
matrix, the block outputs the valid image size.
Data Types: single | double | uint8 | Boolean | fixed point
Best template match located at the one-based (x,y) coordinates. When in the ROI processing mode, the block treats the image around the ROI as an extension of the ROI subregion. Therefore, it computes the best match locations true to the actual boundaries of the ROI. The block outputs the best match coordinates, relative to the top-left corner of the image. The one-based [x y] coordinates of the location correspond to the center of the template. The following table shows how the block outputs the center coordinates for odd and even templates:
| Odd number of pixels in template | Even number of pixels in template |
|---|---|
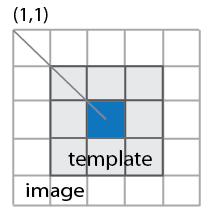 | 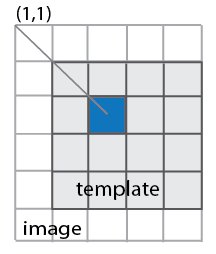 |
Data Types: uint32
Metric values in the neighborhood of the best match, returned as an N-by-N matrix. N, specified in the mask, must be an odd number. When you select Best match location to return the matrix of metrics in a neighborhood around the best match, an exhaustive loop computes all the metric values for the N-by-N neighborhood. This output is particularly useful for performing template matching with subpixel accuracy.
Data Types: single | double | uint8 | Boolean | fixed point
Enable to track the valid neighborhood region. The neighborhood matrix of metric values is valid inside of the ROI. The block sets the NValid output as follows:
1— The neighborhood containing the best match is completely inside the region of interest.0— The neighborhood containing the best match is completely or partially outside of the region of interest.
Dependencies
This port appears when you enable the Output NxN matrix of metric values around best match parameter.
Data Types: Boolean
Enable to track the valid region of interest. If the ROI lies partially outside the valid image, the block only processes the intersection of the ROI and the valid image. The block sets the ROIValid output as follows:
1— The ROI lies completely inside the valid part of the input image.0— The ROI lies completely or partially outside of the valid part of the input image.
Dependencies
This port appears when you enable the Output flag indicating if ROI is valid parameter.
Data Types: Boolean
Parameters
Main Tab
Select match metric as one of:
Sum of absolute differences(SAD)Sum of squared differences(SSD)Maximum absolute difference(MaxAD)
The block computes the match metric at each step of the iteration. Choose the match metric that best suits your application. The block calculates the global optimum for the best metric value. It uses the valid subregion of the input image intersected by the ROI, if provided.
Select the type of output as one of:
Match metric— Output the match metric matrix. This option adds the Metric output port to the block.Best match location— Output the [x,y] coordinates for the location of the best match. This option adds the Loc output port to the block. It also makes the Search method, Output NxN matrix of metric values around best match, and Enable ROI processing parameters available.The Output parameter on the Data Types pane appears when you set the Output parameter on the Main tab to
Metric matrixor if you set it toBest match locationand you enable the Output NxN matrix of metric values around best match parameter.
Specify the search method as either Exhaustive or
Three-step. The Exhaustive
search method is computationally intensive because it searches at every pixel location
of the image. However, this method provides a more precise result.
The Three-step search method is a fast search that uses a
neighborhood approach versus a search at every pixel. The search starts with a step size
equal to or slightly greater than half of the maximum search range and then employs the
following steps:
The block compares nine search points in each step. There is a central point and eight search points located on the search area boundary.
The block decrements the step size by one, after each step, ending the search with a step size of one pixel.
At each new step, the block moves the search center to the best matching point resulting from the previous step. The number one blue circles in the figure below represent a search with a starting step size of three. The number two green circles represent the next search, with step size of two, centered around the best match found from the previous search. Finally, the number three orange circles represent the final search, with step size of one, centered around the previous best match.
Dependencies
This parameter appears when you set the Output parameter to
Best match location.
Enable to add the NMetric and NValid ports.
Dependencies
This parameter appears when you set the Output parameter to
Best match location.
Size of output matrix. This value determines the size of the N-by-N output matrix centered around the best match location index. N must be an odd number.
Dependencies
This parameter appears when you enable the Output NxN matrix of metric values around best match parameter.
Enable ROI processing.
Dependencies
This parameter appears when you set the Output parameter to
Best match location.When you enable this parameter, the block adds the ROI input port, and the Output flag indicating if ROI is valid parameter appears.
Enable to add the ROIValid port.
Dependencies
This parameter appears when you enable the Enable ROI processing parameter.
Data Types Tab
For details on the fixed-point block parameters, see Specify Fixed-Point Attributes for Blocks (DSP System Toolbox).
Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Algorithms
References
[1] Koga T., et. Al. Motion-compensated interframe coding for video conferencing. In National Telecommunications Conference. Nov. 1981, G5.3.1–5, New Orleans, LA.
[2] Zakai M., “General distance criteria” IEEE Transaction on Information Theory, pp. 94–95, January 1964.
[3] Yu, J., J. Amores, N. Sebe, Q. Tian, "A New Study on Distance Metrics as Similarity Measurement" IEEE International Conference on Multimedia and Expo, 2006.
Extended Capabilities
Version History
Introduced in R2009b