
Human-Motion-Analysis
Human motion capture system
You are now following this Submission
- You will see updates in your followed content feed
- You may receive emails, depending on your communication preferences
Human Motion Analysis Programming
Supervised by Prof. Tung-Wu Lu, Dept. of BioMedical Engineering, NTU
MATLAB programs, which use the data derived from a motion capture system and force plates, for human motion analysis, including motion tracking, evaluation of body balance, and derivation of joint forces and torques of the lower body, etc.
Requirements
- MATLAB 2015 (or newer versions)
- MTIMESX function(Fast Matrix Multiply with Multi-Dimensional)
Functions & Execution Results
Week1: Transformation between Global & Local Coordinate
The transformation between global & local coordinate of marker position on lower body segemnts.
Week2: COP Tracking
Derive the COP from data of two force plates and display the positions relative to force plates.

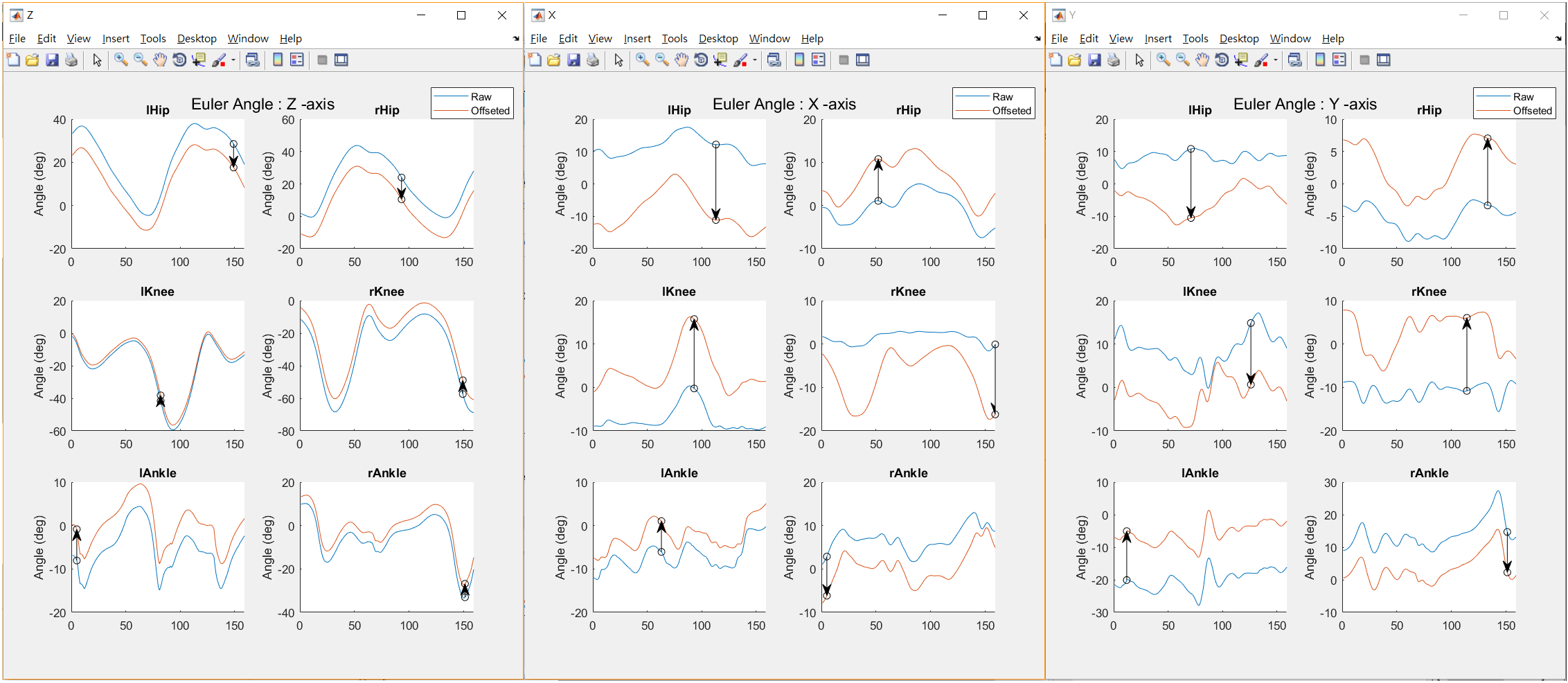
Week3: Euler Angle & Fixed Angle
- Represent the rotations of body segemnts with Euler angle and fixed angle.
- Display the difference of Euler angle before and after static calibration of indivisual.

Week4: Curve Fitting
- Smoothen the data curve and display the angular velocity of lower body.
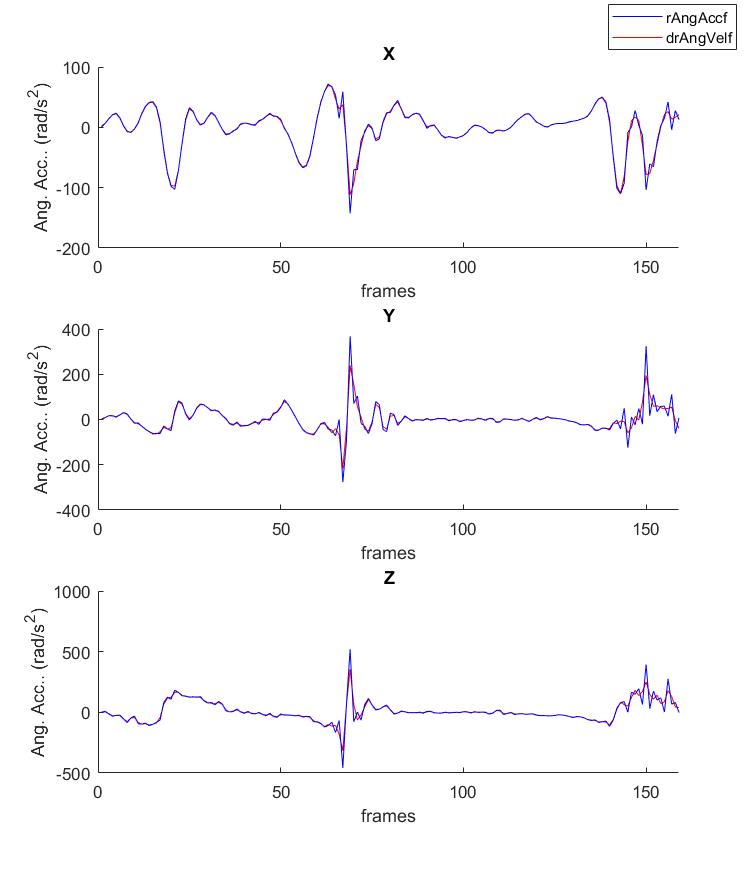
- Consider right foot only, compare the results of analytic solution of angular acceleration & 1st derivation of angular velocity.
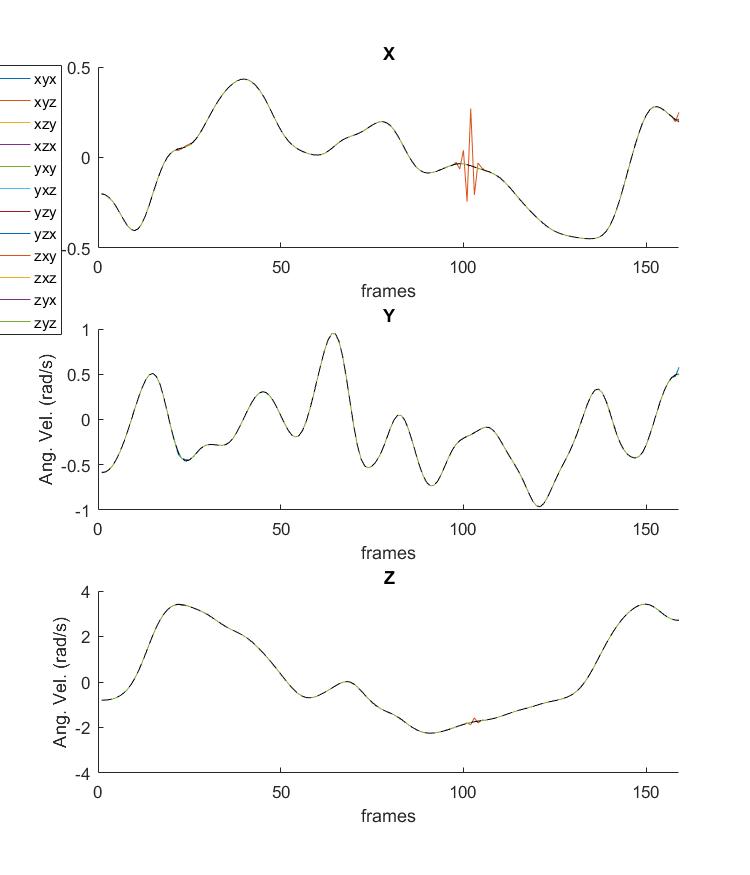
- Consider right thigh only, compare the angular velocity derive from 12 sequence of Euler angle.
The one with Gimbal lock during motion can be easily observed and then be avoided.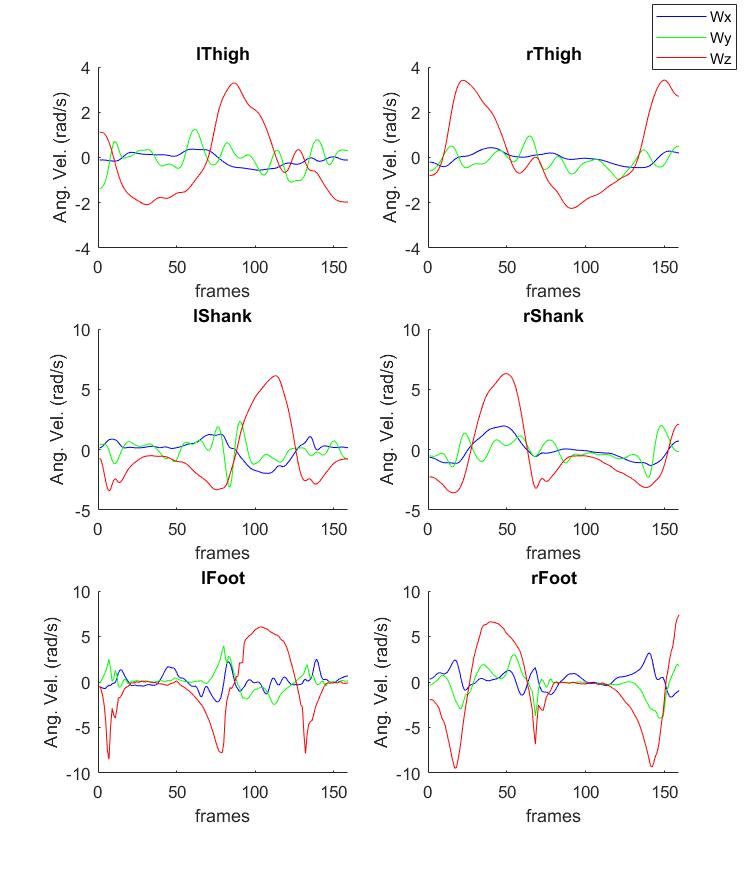



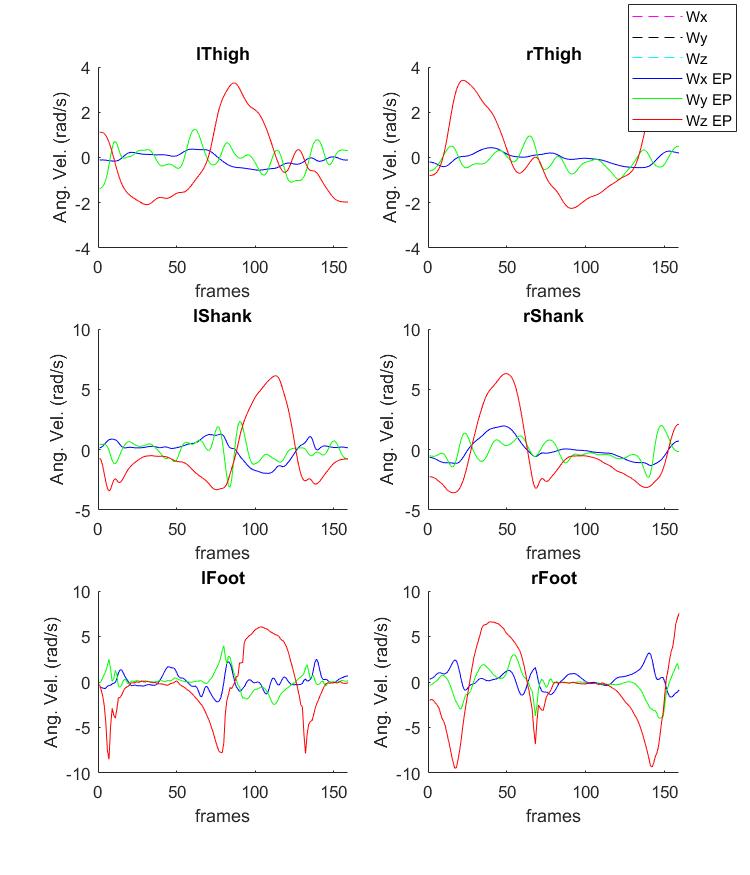
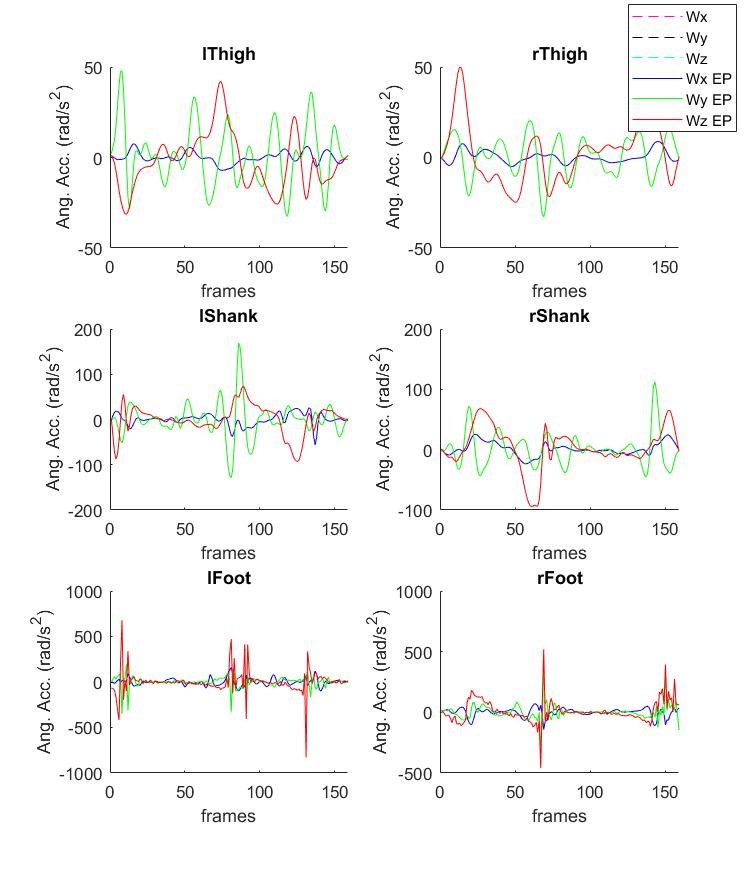
Week5: Quaternions (Euler Parameters)
- Write the function "unwrapEP.m" to eliminate the discontinuity of Quaternions data.
- Compare angular velocity & angular acceleration derived from Euler angle and Quaternions(EP).
.jpg)
.jpg)


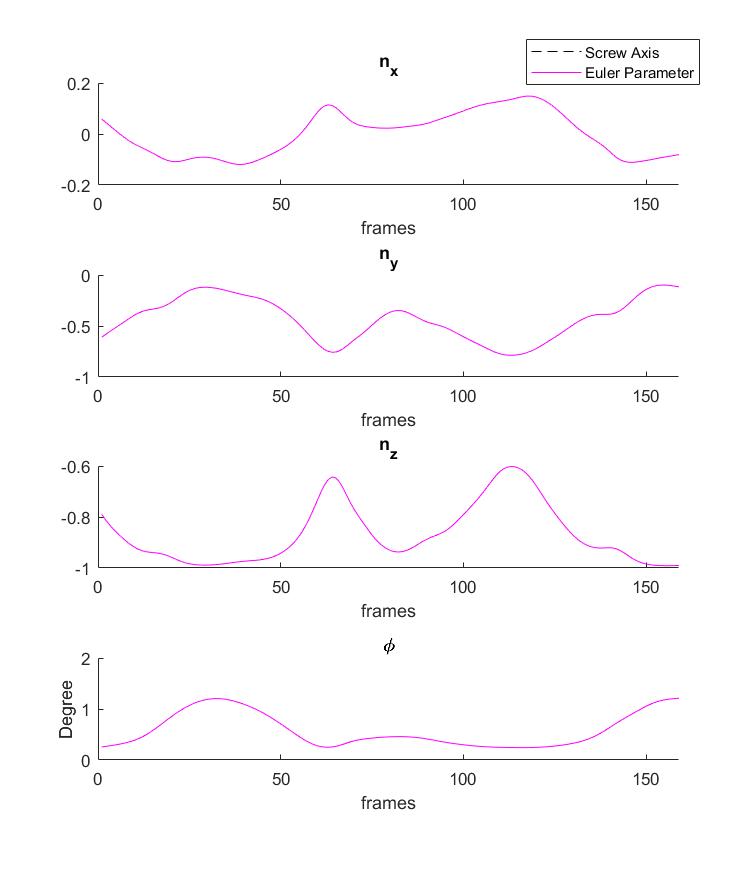
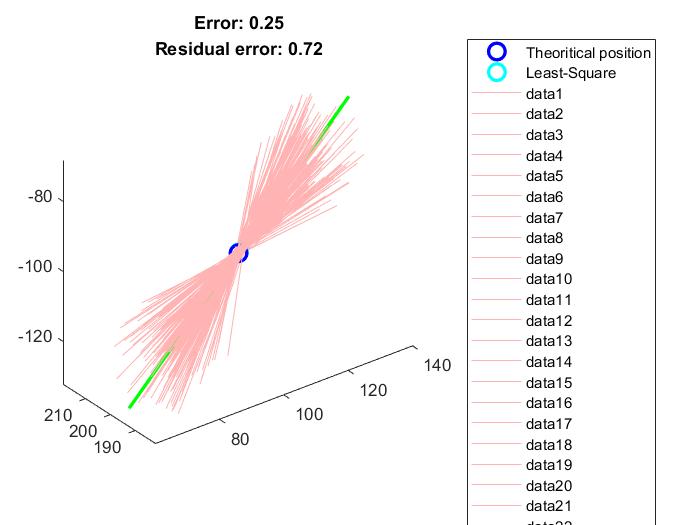
Week6: Screw Axis (Helical Axis)
- Compare the rotation axis and angle derived from Screw axis and Quaternoins.
- Determine the joint center & rotation axis with least-square error from several rotation axes dervied during the motion.


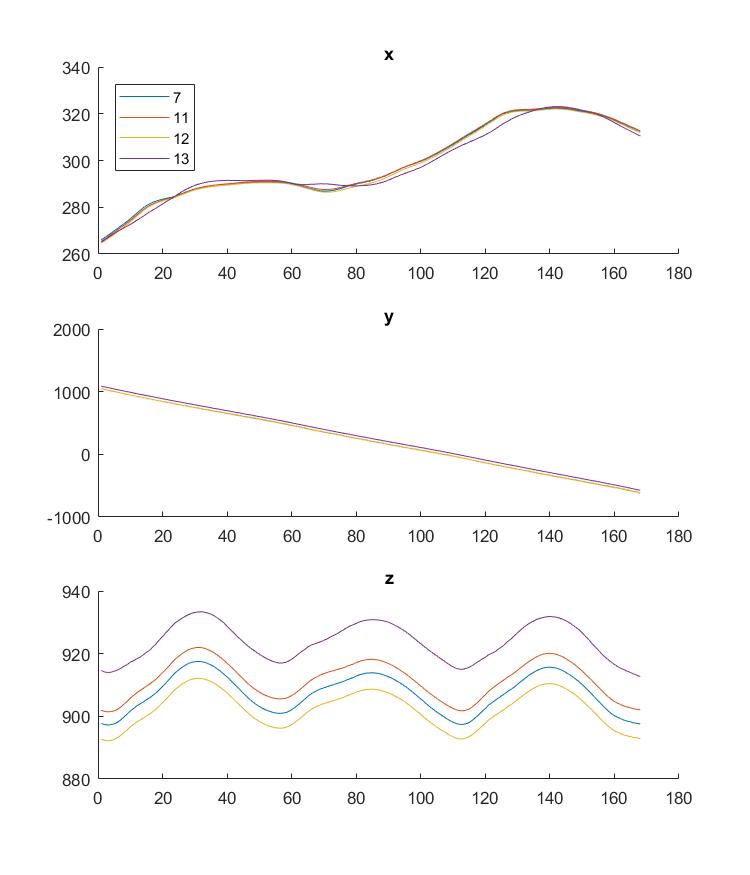
Week7: COM Tracking
- Derive & compare the COM position of whole body using Dempster's anthropometrical data with simplifying the body model as 7, 11, 12, & 13 segments.
- Display the COM positions. (Yellow: markers' position, green: COM of body segments, purple: COM of whole body).


Week8: Evaluation of Body Balance
Derive the COP data during the recipient is standing still. Determined the eclipse covering 95% of these COPs with Principal COmponent Analysis (PCA). The area of the eclipse and length of its axes can be a indicator for evaluating one's body balancing ability.

Week9: Angular Momentum
Derive the angular momentum and 1st derivation of angular momentum during the motion.


Week10: Joint Moment & Joint Force
Derive the joint moment & joint force of angular momentum during the motion. The results are normalized by being divided by the weight of recipient.


misc
In the last few minutes of Marvel's The Punisher S1E1 (Netflix), a similar result appeared when David Lieberman used gait detection and recognized Frank Castle, who faked dead after revenging for his family.

Cite As
Wei-Hsiang Wang (2026). Human-Motion-Analysis (https://github.com/mattwang44/Human-Motion-Analysis-MATLAB/releases/tag/0.0.1), GitHub. Retrieved .
General Information
- Version 0.0.1 (20.1 MB)
-
 View License on GitHub
View License on GitHub
MATLAB Release Compatibility
- Compatible with any release
Platform Compatibility
- Windows
- macOS
- Linux
| Version | Published | Release Notes | Action |
|---|---|---|---|
| 0.0.1 |