Quaternion Normalize
Normalize quaternion

Libraries:
Aerospace Blockset /
Utilities /
Math Operations
Description
The Quaternion Normalize block calculates a normalized quaternion for a given quaternion. Aerospace Blockset™ uses quaternions that are defined using the scalar-first convention. For the equations used for the quaternion and normalized quaternion, see Algorithms.
Examples
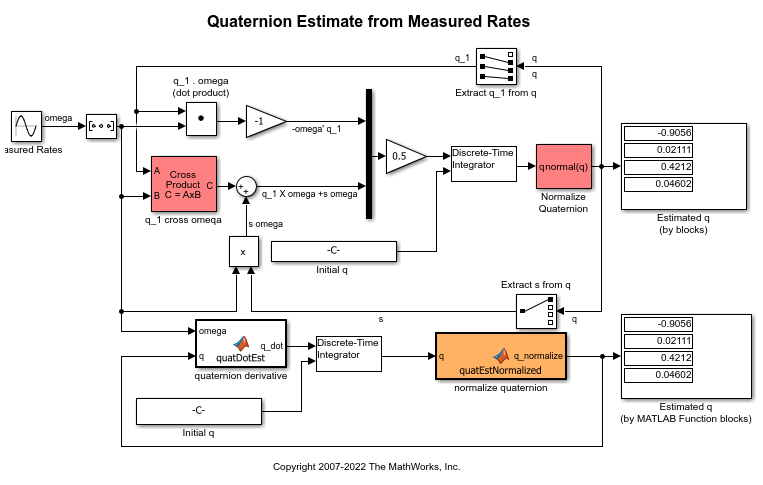
Quaternion Estimate from Measured Rates
Estimate a quaternion and model the equations.
Ports
Input
Output
Algorithms
The quaternion has the form of
The normalized quaternion has the form of
References
[1] Stevens, Brian L., Frank L. Lewis. Aircraft Control and Simulation, Second Edition. Hoboken, NJ: Wiley–Interscience.
Extended Capabilities
Version History
Introduced before R2006a