Discrete Varying Notch
Discrete-time notch filter with varying coefficients
Libraries:
Control System Toolbox /
Linear Parameter Varying
Description
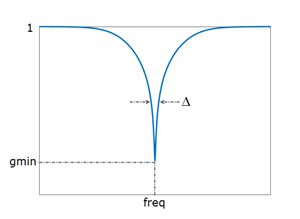
The block implements the Tustin discretization of a continuous-time notch filter with varying coefficients. Feed the continuous-time values of the notch frequency, minimum gain, and damping ratio to the freq, gmin, and damp input ports, respectively. These parameters control the notch depth and frequency of the continuous-time notch filter as shown in the following illustration. The damping ratio damp controls the notch width Δ; larger damp means larger Δ.
Use this block and the other blocks in the Linear Parameter Varying library to implement common control elements with variable parameters or coefficients. For more information, see Model Gain-Scheduled Control Systems in Simulink.
Caution
Avoid making the filter coefficients depend on the block output y. If you have such dependence, the resulting filter causes an algebraic loop, because computing the block output value requires knowing the block output value. This algebraic loop is prone to instability and divergence.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017b