dss2ss
Description
sys = dss2ss(dsys)dsys of the form
and returns an explicit state-space model sys of the form
Here, dsys must be proper and the number of states
xe in sys is smaller than
number of states x in dsys when E
is singular (the explicit form removes the algebraic variables). Use findop to
compute matching initial conditions when the state is reduced.
Examples
This example shows how to use dss2ss to convert a state-space model in descriptor form to explicit form.
For this example, consider a cube rotating about its corner with inertia tensor J and a damping force F of 0.2 magnitude. The input to the system is the driving torque while the angular velocities are the outputs. The equation is given by:
The state-space matrices for the cube are:
Specify the A, B, C and D matrices, and create the continuous-time descriptor state-space model.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -F; B = eye(3); C = eye(3); D = 0; E = J; sysd = dss(A,B,C,D,E);
To convert this model to explicit form, use dss2ss.
syse = dss2ss(sysd); syse.E
ans =
[]
As you can see, the matrix is empty. The dss2s function provides an equivalent explicit transformation.
sigma(sysd,syse,'r--')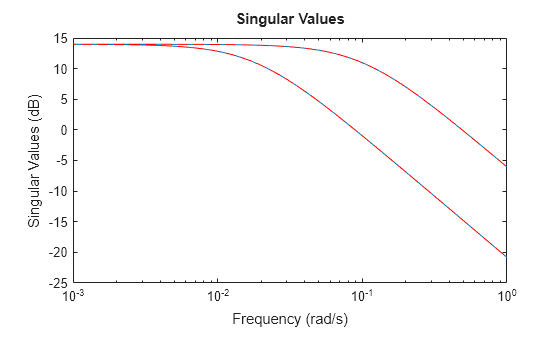
Input Arguments
Output Arguments
Version History
Introduced in R2024a