ncapScore
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
[
obtains the assessment score score,assessmentTableUpdated] = ncapScore(euroAssessmentObj,ncapTestName,assessmentTable)score for the Euro NCAP® test scenario with name ncapTestName defined by the
protocol specifications euroAssessmentObj. The syntax also updates the
input Euro NCAP assessment table assessmentTable and stores the
assessment table and score in the input protocol specifications object
euroAssessmentObj.
[
obtains the assessment score score,assessmentTableUpdated] = ncapScore(euroAssessmentObj,ncapTestName)score and the assessment table
assessmentTableUpdated for the Euro NCAP test scenario with name ncapTestName from the input
protocol specifications object euroAssessmentObj. If
euroAssessmentObj does not contain a score and updated assessment
table for the specified test, the function returns an empty score and empty assessment
table.
[
obtains all assessment scores from the input protocol specifications object
score,groupScore,allScore] = ncapScore(euroAssessmentObj,ncapGroupName)euroAssessmentObj, and returns the aggregated score
score for the specified test group name
ncapGroupName. The syntax also returns the subgroup score
groupScore and the scores for all tests belonging to the specified
group ncapGroupName. Note that, for a specified group name, you must
use the first syntax of this function to evaluate the scores for its relevant test scenarios
prior to using this syntax. Otherwise, this syntax returns the aggregated scores as
NaN for test scenarios without evaluated scores.
Examples
Specify a Euro NCAP test name from protocol specification years 2026–2028.
ncapTestName = "CA FC CCFtap";Create a Euro NCAP protocol specification object for protocol specification years 2026–2028.
euroAssessmentObj = euroAssessment(2026);
Create an empty Euro NCAP assessment table for the specified Euro NCAP test name.
emptyAssessmentTable = assessmentTable(euroAssessmentObj,ncapTestName)
emptyAssessmentTable=16×2 table
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 12.5m/s" NaN
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 16.6667m/s" NaN
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 22.2222m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 12.5m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 16.6667m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 22.2222m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 12.5m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 16.6667m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 22.2222m/s" NaN
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 12.5m/s" NaN
Create a copy of the empty assessment table, and fill in the values of the assessment criteria in the table.
filledAssessmentTable = emptyAssessmentTable; filledAssessmentTable.ImpactVelocity(:) = 1;
Compute the score for the specified Euro NCAP test name.
[score,assessmentTableUpdated] = ncapScore(euroAssessmentObj,ncapTestName,filledAssessmentTable);
Display the updated assessment table.
disp(assessmentTableUpdated)
TestDescription ImpactVelocity EntryStatus Points Weights Colors
_______________________________________________________ ______________ ___________ ______ _______ ______
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
Generate a report showing the consolidated assessment results for the Euro NCAP test.
ncapReport(euroAssessmentObj,ncapTestName);
Export the report as a PNG image.
exportReport(euroAssessmentObj,ncapTestName,"results.png")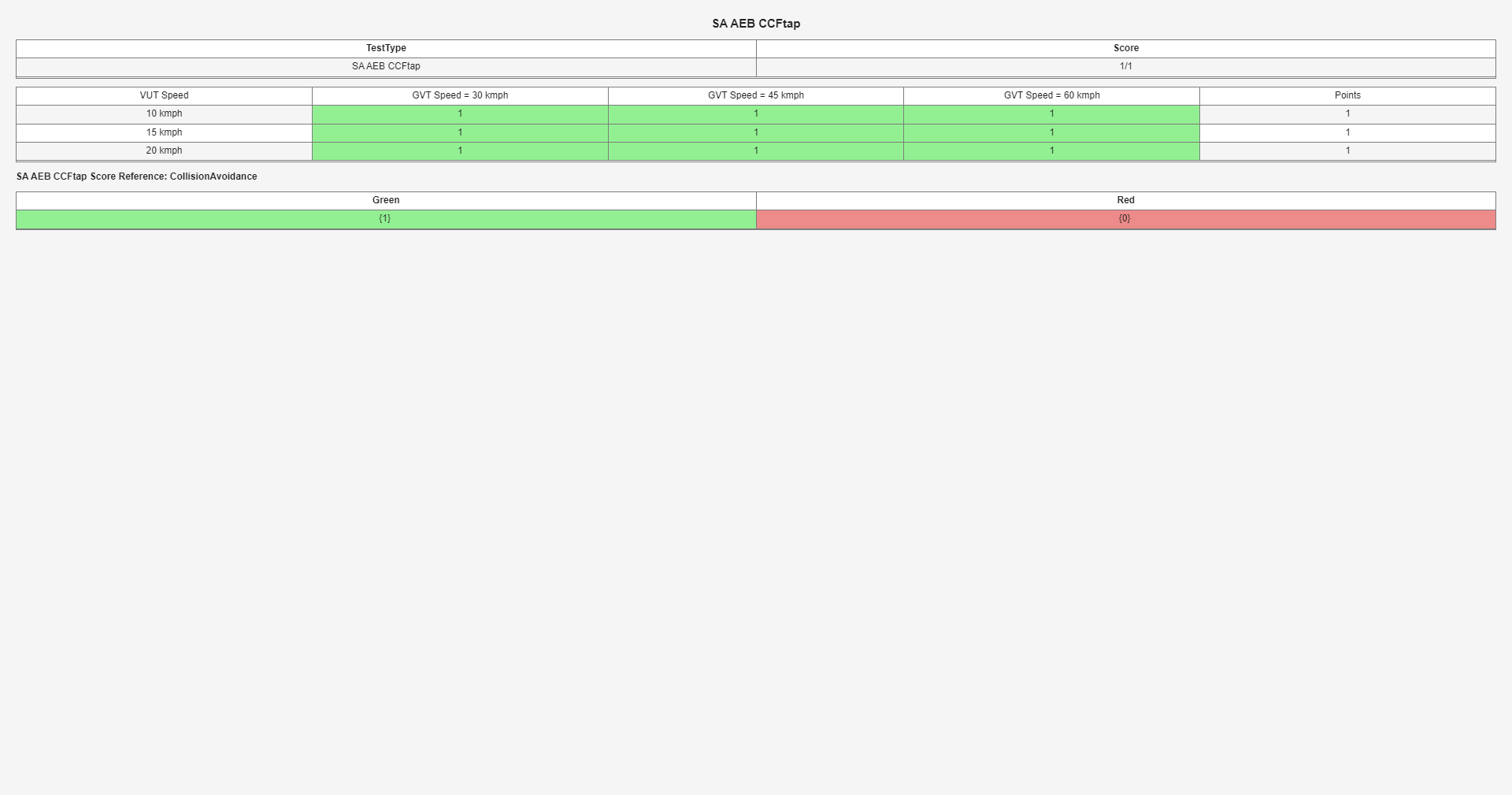
Specify a group of Euro NCAP test scenario names from protocol specification years 2026–2028.
ncapTestGroup = {'CA FC CCRs','CA FC CCRm','CA FC CCRb','CA FC CCCscp', ...
'CA FC CCFhol','CA FC CCFhos','CA FC CCFtap','CA FC CPLA', ...
'CA FC CPFA','CA FC CPNA','CA FC CPNCO', ...
'CA FC CPTAfo','CA FC CPTAno','CA FC CPTAfs', ...
'CA FC CPTAns','CA FC CBLA','CA FC CBFA', ...
'CA FC CBNA','CA FC CBNAO','CA FC CBTAfo', ...
'CA FC CBTAno','CA FC CBTAfs','CA FC CBTAns', ...
'CA FC CMRs','CA FC CMRb','CA FC CMCscp','CA FC CMFtap'};Load assessment criteria values for all the specified scenarios. updatedAssessmentTable is a cell array of the same size as ncapTestGroup. Each cell in updatedAssessmentTable contains a table for its corresponding Euro NCAP test scenario in ncapTestGroup.
Note: To use your own assessment data, you can run a test bench for each Euro NCAP test scenario to obtain its assessment criteria values.
load updatedAssessmentTable.matCreate a Euro NCAP protocol specification object for protocol specification years 2026–2028.
euroAssessmentObj = euroAssessment(2026);
Create assessment tables for all test scenarios in the test group using the assessmentTable function.
ncapTestGroupAssessmentTables = cellfun(@(x) assessmentTable(euroAssessmentObj,x),ncapTestGroup,UniformOutput=false);
Per Euro NCAP test specifications, the score of each scenario depends on its assessment criteria. For each test scenario:
Get the assessment criteria from its corresponding assessment table.
Update the assessment criteria values using the previously loaded
updatedAssessmentTablecell array.Compute the score for the test scenario using the
ncapScorefunction.
for i = 1:numel(ncapTestGroup) ncapScore(euroAssessmentObj,ncapTestGroup{i},updatedAssessmentTable{i}); end
Compute the aggregate Euro NCAP score for the group name representing car-to-car scenarios.
ncapGroupName = "CA FC CarToCar";
[scoreC2C,groupScoreC2C,allScoreC2C] = ncapScore(euroAssessmentObj,ncapGroupName)scoreC2C = struct with fields:
AggregateScore: 18.5829
AvailableScore: 24
groupScoreC2C=7×3 table
"CCCscp" 6.7500 7.5000
"CCFhol" 2.2500 2.5000
"CCFhos" 2.2500 2.5000
"CCFtap" 4.5000 5
"CCRb" 0.7915 2
"CCRm" 1.3664 3.0000
"CCRs" 0.6750 1.5000
allScoreC2C = struct with fields:
CCRs: 0.6750
CCRm: 1.3664
CCFtap: 4.5000
CCRb: 0.7915
CCFhos: 2.2500
CCFhol: 2.2500
CCCscp: 6.7500
Compute the aggregate Euro NCAP score for the group name representing car-to-pedestrian scenarios.
ncapGroupName = "CA FC Pedestrian";
[scoreC2P,groupScoreC2P,allScoreC2P] = ncapScore(euroAssessmentObj,ncapGroupName)scoreC2P = struct with fields:
AggregateScore: 4.7583
AvailableScore: 10
groupScoreC2P=5×3 table
"CPFA" 0.4583 1.2500
"CPLA" 0.6750 2.5000
"CPNA" 0.4583 1.2500
"CPNCO" 0.9167 2.5000
"CPTA" 2.2500 2.5000
allScoreC2P = struct with fields:
CPTA: [1×1 struct]
CPNA: 0.4583
CPFA: 0.4583
CPNCO: 0.9167
CPLA: 0.6750
Compute the aggregate Euro NCAP score for the group name representing car-to-bicyclist scenarios.
ncapGroupName = "CA FC Bicyclist";
[scoreC2B,groupScoreC2B,allScoreC2B] = ncapScore(euroAssessmentObj,ncapGroupName)scoreC2B = struct with fields:
AggregateScore: 4.1343
AvailableScore: 10
groupScoreC2B=5×3 table
"CBFA" 0.4583 1.2500
"CBLA" 0.5093 2.5000
"CBNA" 0.4583 1.2500
"CBNAO" 0.4583 1.2500
"CBTA" 2.2500 2.5000
allScoreC2B = struct with fields:
CBTA: [1×1 struct]
CBFA: 0.4583
CBNA: 0.4583
CBNAO: 0.4583
CBLA: 0.5093
Compute the aggregate Euro NCAP score for the group name representing car-to-motorcyclist scenarios.
ncapGroupName = "CA FC Motorcyclist";
[scoreC2M,groupScoreC2M,allScoreC2M] = ncapScore(euroAssessmentObj,ncapGroupName)scoreC2M = struct with fields:
AggregateScore: 12.7472
AvailableScore: 16
groupScoreC2M=4×3 table
"CMCscp" 6.7500 7.5000
"CMFtap" 4.5000 5
"CMRb" 0.8222 2
"CMRs" 0.6750 1.5000
allScoreC2M = struct with fields:
CMRs: 0.6750
CMRb: 0.8222
CMFtap: 4.5000
CMCscp: 6.7500
Generate a report showing the consolidated assessment results for all the Euro NCAP frontal collision scenarios.
ncapGroupName = "CA FC";
ncapReport(euroAssessmentObj,ncapGroupName);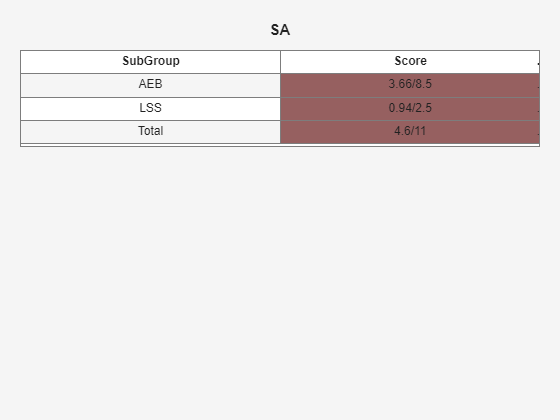
Export the generated report as a PNG image.
exportReport(euroAssessmentObj,ncapGroupName,"results.png")Input Arguments
Output Arguments
Limitations
The ncapScore, ncapReport, and
exportReport object functions does not support these scenarios:
"SA LSS Lane Departure Warning""SA LSS HMI Blind Spot Monitoring GVT""SA LSS HMI Blind Spot Monitoring EMT"
Tips
You must replace the NaN fields of the returned table with appropriate
values, and specify the updated table as the assessmentTable input
argument of the ncapScore
function, to get Euro NCAP assessment scores. For more information, see the Compute Score for Euro NCAP Test Scenario and Generate Report example. For more
information on how to compute assessment criteria values, see the Euro NCAP Testing with RoadRunner Scenario example.
References
[1] European New Car Assessment Programme (Euro NCAP). Assessment Protocol - Vulnerable Road User Protection, Implementation 2023, Version 11.4, December 2023.
[2] European New Car Assessment Programme (Euro NCAP). Assessment Protocol - Safety Assist Collision Avoidance, Implementation 2023, Version 10.4.1, February 2024.