dsp.DigitalUpConverter
Interpolate digital signal and translate it from baseband to IF band
Description
The dsp.DigitalUpConverter
System object™ interpolates a digital signal, and translates it from baseband to intermediate
frequency (IF) band.
To digitally upconvert the input signal:
Create the
dsp.DigitalUpConverterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
This object supports C/C++ code generation and SIMD code generation under certain conditions. For more information, see Code Generation.
Creation
Description
upConv = dsp.DigitalUpConverterupConv.
upConv = dsp.DigitalUpConverter(PropertyName=Value)Name set to the specified
value Value. You can specify one or more name-value pair arguments in
any order as
(Name1=Value1,...,NameN=ValueN).
For example, create an object that upsamples the input signal by a factor of 20, using a
filter with the specified
qualities.
upConv = dsp.DigitalUpConverter(InterpolationFactor=20,... SampleRate=Fs,... Bandwidth=2e3,... StopbandAttenuation=55,... PassbandRipple=0.2,... CenterFrequency=50e3);
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a DUC System object™ that upsamples a 1-kHz sinusoidal signal by a factor of 20 and upconverts it to 50 kHz.
Create a sine wave generator to obtain the 1-kHz sinusoidal signal with a sample rate of 6 kHz.
Fs = 6e3; % Sample rate sine = dsp.SineWave(Frequency=1000,... SampleRate=Fs,... SamplesPerFrame=1024); x = sine(); % generate signal
Create a DUC System object. Use minimum order filter designs and set the passband ripple to 0.2 dB and stopband attenuation to 55 dB. Set the double-sided signal bandwidth to 2 kHz.
upConv = dsp.DigitalUpConverter(... InterpolationFactor=20,... SampleRate=Fs,... Bandwidth=2e3,... StopbandAttenuation=55,... PassbandRipple=0.2,... CenterFrequency=50e3);
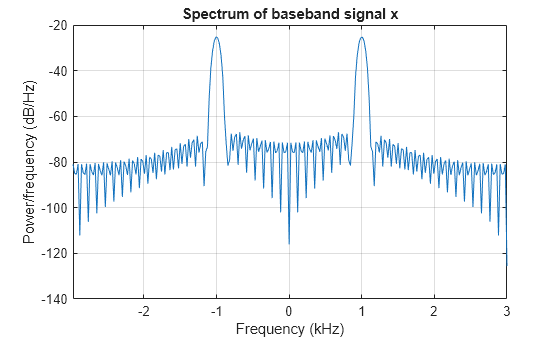
Create a spectrum estimator to visualize the signal spectrum before and after upconverting.
window = hamming(floor(length(x)/10)); figure; pwelch(x,window,[],[],Fs,"centered") title("Spectrum of baseband signal x")
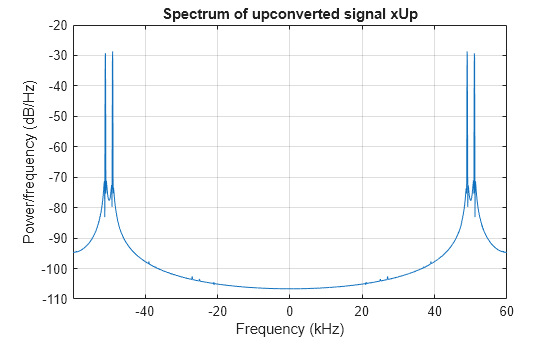
Upconvert the signal and visualize the spectrum.
xUp = upConv(x); window = hamming(floor(length(xUp)/10)); figure; pwelch(xUp,window,[],[],20*Fs,"centered") title("Spectrum of upconverted signal xUp")
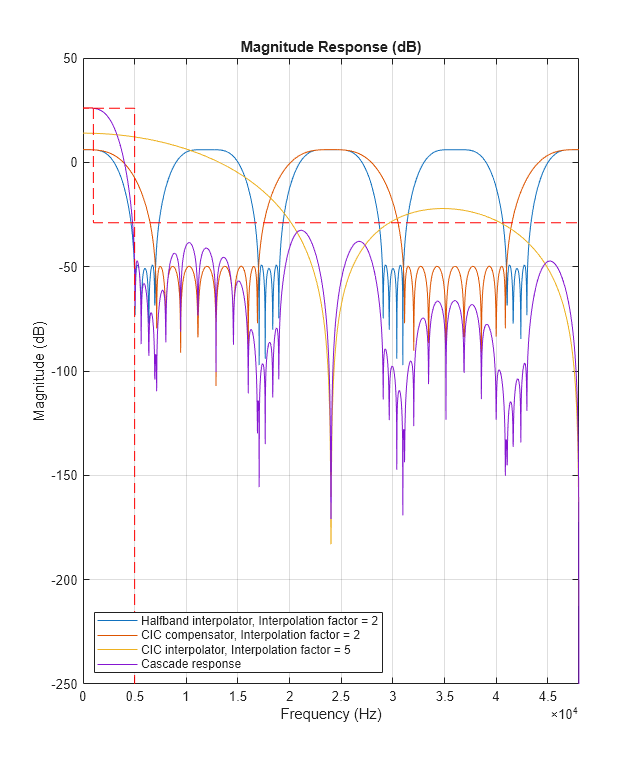
Visualize the response of the interpolation filters.
visualize(upConv)
More About
The block diagram represents the DUC arithmetic with signed fixed-point inputs.
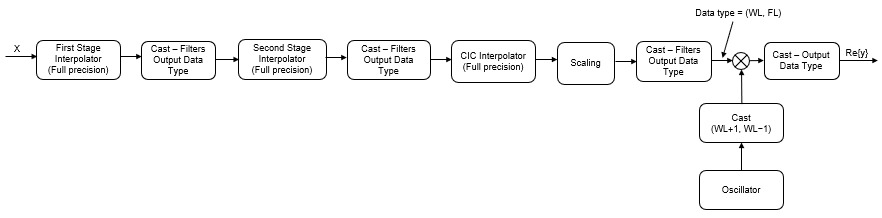
WL is the word length of the input, and FL is the fraction length of the input.
The output of each filter is cast to the filter output data type. In the
dsp.DigitalUpConverterobject, you can specify the filter output data type through theFiltersOutputDataTypeandCustomFiltersOutputDataTypeproperties. In the Digital Up-Converter block, you can specify the filter output data type through the Stage output parameter. The casting of the CIC output occurs after the scaling factor is applied.The oscillator output is cast to a word length equal to the filter output data type word length plus one. The fraction length is equal to the filter output data type word length minus one.
The scaling at the output of the CIC interpolator consists of coarse-gain and fine-gain adjustments. The coarse gain is achieved using the
reinterpretcast(Fixed-Point Designer) function on the CIC interpolator output. The fine gain is achieved using full-precision multiplication.
The figure shows the coarse-gain and fine-gain operations.
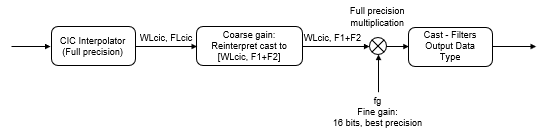
If the normalization gain is G (where 0<G≦1), then:
WLcic is the word length of the CIC interpolator output, and FLcic is the fraction length of the CIC interpolator output.
F1 = abs(nextpow2(G)), indicating the part of G achieved by using bit shifts (coarse gain).F2 is the fraction length specified by the filter output data type.
fg = fi((2^F1)*G,true,16), which indicates that the remaining gain cannot be achieved with a bit shift (fine gain).
Algorithms
The digital upconverter upsamples the input signal using a cascade of three interpolation filters. This algorithm frequency-upconverts the upsampled signal by multiplying it with a complex exponential that has the specified center frequency. In this case, the filter cascade consists of an FIR interpolation stage, a second stage for CIC compensation, and a CIC interpolator. The block diagram shows the architecture of the digital upconverter.

The scaling section normalizes the CIC gain and the oscillator power. It can also contain a correction factor to achieve the desired ripple specification. Depending on how you set the interpolation factor, the block bypasses the first filter stage. When the input data type is floating point, the algorithm implements an N-section CIC interpolation filter as a FIR filter with a response that corresponds to a cascade of N boxcar filters. The algorithm emulates a CIC filter with an FIR filter so that you can run simulations with floating-point data. When the input data type is a fixed-point type, the algorithm implements a true CIC filter with actual comb and integrator sections.
This block diagram represents the DUC arithmetic with floating-point inputs.

For details about fixed-point operation, see Fixed Point.