drift
Drift-rate model component
Description
The drift object specifies the drift-rate component of
continuous-time stochastic differential equations (SDEs).
The drift-rate specification supports the simulation of sample paths of
NVars state variables driven by NBrowns
Brownian motion sources of risk over NPeriods consecutive observation
periods, approximating continuous-time stochastic processes.
The drift-rate specification can be any
NVars-by-1 vector-valued function
F of the general form:
where:
Ais anNVars-by-1vector-valued function accessible using the (t, Xt) interface.Bis anNVars-by-NVarsmatrix-valued function accessible using the (t, Xt) interface.
And a drift-rate specification is associated with a vector-valued SDE of the form
where:
Xt is an
NVars-by-1state vector of process variables.dWt is an
NBrowns-by-1Brownian motion vector.A and B are model parameters.
The drift-rate specification is flexible, and provides direct parametric support for static/linear drift models. It is also extensible, and provides indirect support for dynamic/nonlinear models via an interface. This enables you to specify virtually any drift-rate specification.
Creation
Syntax
Description
DriftRate = drift(A,B)DriftRate model component.
Specify required input parameters A and
B as one of the following types:
A MATLAB® array. Specifying an array indicates a static (non-time-varying) parametric specification. This array fully captures all implementation details, which are clearly associated with a parametric form.
A MATLAB function. Specifying a function provides indirect support for virtually any static, dynamic, linear, or nonlinear model. This parameter is supported via an interface, because all implementation details are hidden and fully encapsulated by the function.
Note
You can specify combinations of array and function input parameters as needed.
Moreover, a parameter is identified as a deterministic function
of time if the function accepts a scalar time t
as its only input argument. Otherwise, a parameter is assumed to be
a function of time t and state
X(t) and is invoked with both input
arguments.
The drift object that you create encapsulates the
composite drift-rate specification and returns the following displayed parameters:
Rate— The drift-rate function, F.Rateis the drift-rate calculation engine. It accepts the current time t and anNVars-by-1state vector Xt as inputs, and returns anNVars-by-1drift-rate vector.A— Access function for the input argumentA.B— Access function for the input argumentB.
Input Arguments
Output Arguments
Properties
Examples
More About
There are inheritance relationships among the SDE classes.
The following figure illustrates the inheritance relationships.
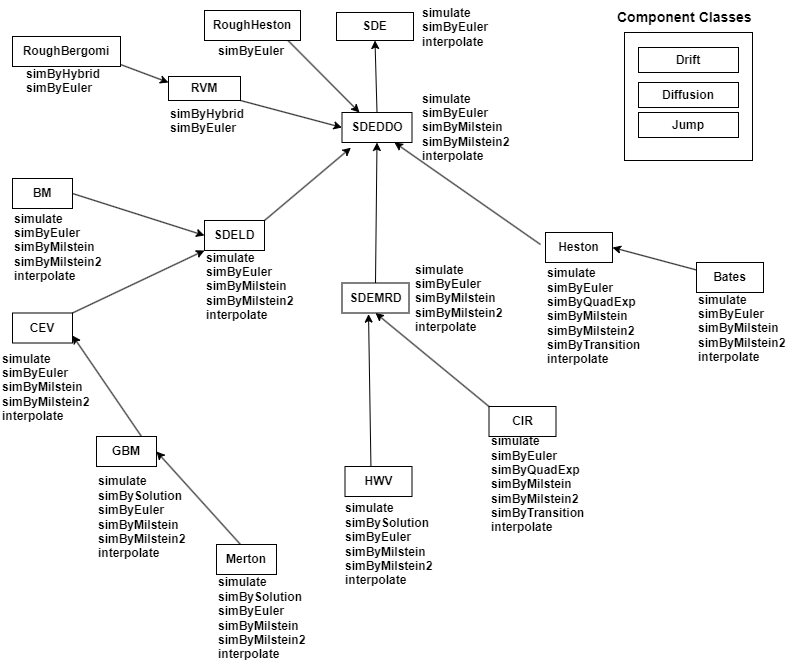
For more information, see SDE Class Hierarchy.
Algorithms
When you specify the input arguments A and B
as MATLAB arrays, they are associated with a linear drift parametric form. By
contrast, when you specify either A or B as a
function, you can customize virtually any drift-rate specification.
Accessing the output drift-rate parameters A and
B with no inputs simply returns the original input
specification. Thus, when you invoke drift-rate parameters with no inputs, they behave
like simple properties and allow you to test the data type (double vs. function, or
equivalently, static vs. dynamic) of the original input specification. This is useful
for validating and designing methods.
When you invoke drift-rate parameters with inputs, they behave like functions, giving
the impression of dynamic behavior. The parameters A and
B accept the observation time t and a state
vector Xt, and return an array of appropriate
dimension. Specifically, parameters A and B
evaluate the corresponding drift-rate component. Even if you originally specified an
input as an array, drift treats it as a static function of time and
state, by that means guaranteeing that all parameters are accessible by the same
interface.
References
[1] Aït-Sahalia, Yacine. “Testing Continuous-Time Models of the Spot Interest Rate.” Review of Financial Studies, vol. 9, no. 2, Apr. 1996, pp. 385–426.
[2] Aït-Sahalia, Yacine. “Transition Densities for Interest Rate and Other Nonlinear Diffusions.” The Journal of Finance, vol. 54, no. 4, Aug. 1999, pp. 1361–95.
[3] Glasserman, Paul. Monte Carlo Methods in Financial Engineering. Springer, 2004.
[4] Hull, John. Options, Futures and Other Derivatives. 7th ed, Prentice Hall, 2009.
[5] Johnson, Norman Lloyd, et al. Continuous Univariate Distributions. 2nd ed, Wiley, 1994.
[6] Shreve, Steven E. Stochastic Calculus for Finance. Springer, 2004.
Version History
Introduced in R2008a