Localization
These examples apply sensor fusion and filtering techniques to localize platforms using IMU, GPS, and camera data.
Featured Examples
Autonomous Underwater Vehicle Pose Estimation Using Inertial Sensors and Doppler Velocity Log
Fuse GPS, doppler velocity log sensor, and inertial measurement unit measurements to estimate the pose of an autonomous underwater vehicle.
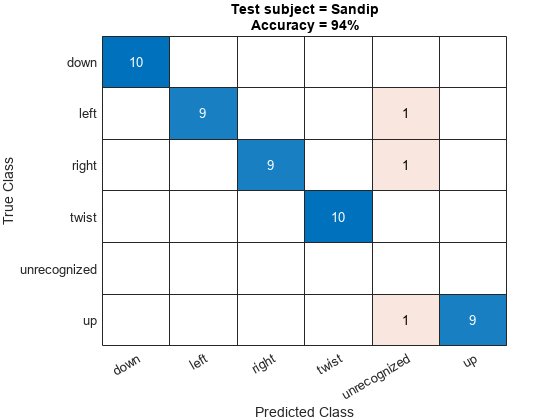
Gesture Recognition Using Inertial Measurement Units
Recognize gestures based on a handheld inertial measurement unit.
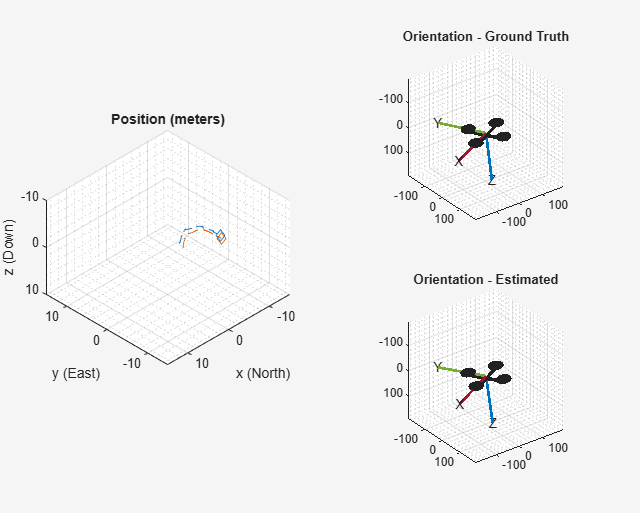
IMU and GPS Fusion for Inertial Navigation
How you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicles (UAVs) or quadcopters.
Estimate Position and Orientation of a Ground Vehicle
Estimate the position and orientation of ground vehicles by fusing data from an inertial measurement unit (IMU) and a global positioning system (GPS) receiver.
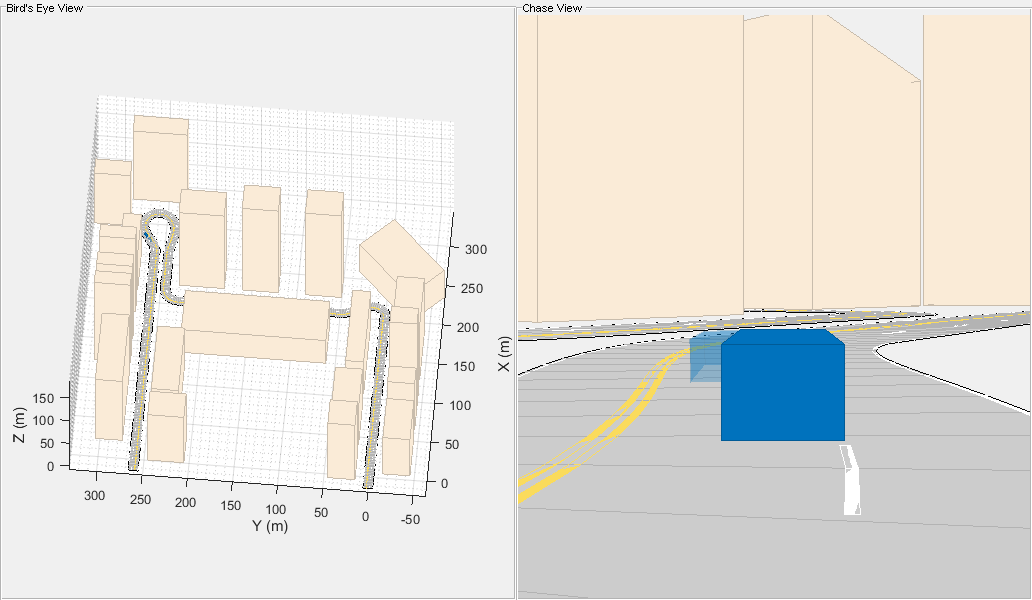
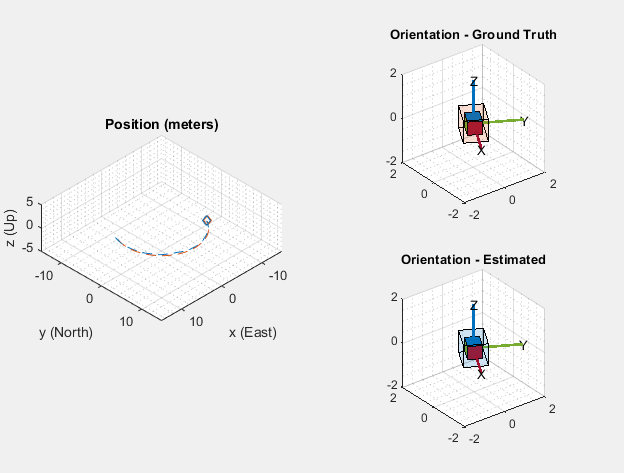
Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera.