gamultiobj
Find Pareto front of multiple fitness functions using genetic algorithm
Syntax
Description
x = gamultiobj(fun,nvars)x on the Pareto Front of the objective functions defined in
fun. nvars is the dimension of the
optimization problem (number of decision variables). The solution
x is local, which means it might not be on the global Pareto
front.
Note
Passing Extra Parameters explains how to pass extra parameters to the objective function and nonlinear constraint functions, if necessary.
x = gamultiobj(fun,nvars,A,b,Aeq,beq)x subject to the linear equalities and the linear inequalities , see Linear Equality Constraints. (Set
A = [] and b = [] if
no inequalities exist.) gamultiobj supports linear constraints
only for the default PopulationType option
('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub)x
so that a local Pareto set is found in the range
lb ≤ x ≤ ub,
see Bound Constraints. Use empty matrices
for Aeq and beq if no linear equality
constraints exist. gamultiobj supports bound constraints only
for the default PopulationType option
('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon.
The function nonlcon accepts x and returns
vectors ineqnonlin and eqnonlin, representing
the nonlinear inequalities and equalities respectively.
gamultiobj minimizes fun such that
ineqnonlin(x) ≤ 0 and
eqnonlin(x) = 0. (Set
lb = [] and ub = [] if
no bounds exist.) gamultiobj supports nonlinear constraints
only for the default PopulationType option
('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x =
gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon take integer
values.
Note
When there are integer constraints, gamultiobj does not accept nonlinear equality constraints, only nonlinear inequality constraints.
Examples
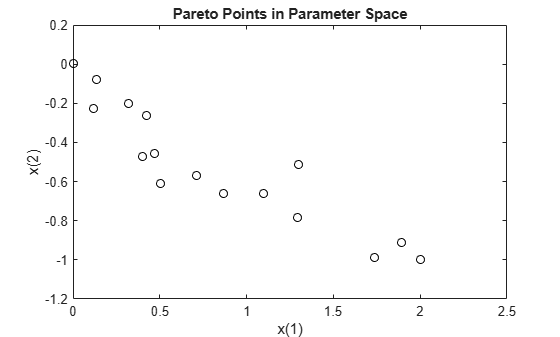
Find the Pareto front for a simple multiobjective problem. There are two objectives and two decision variables x.
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
Find the Pareto front for this objective function.
rng default % For reproducibility x = gamultiobj(fitnessfcn,2);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Plot the solution points.
plot(x(:,1),x(:,2),"ko") xlabel("x(1)") ylabel("x(2)") title("Pareto Points in Parameter Space")
To see the effect of a linear constraint on this problem, see Multiobjective Problem with Linear Constraint.
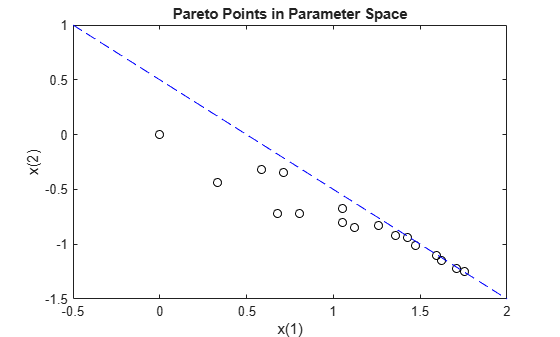
This example shows how to find the Pareto front for a multiobjective problem in the presence of a linear constraint.
There are two objective functions and two decision variables x.
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
The linear constraint is .
A = [1,1]; b = 1/2;
Find the Pareto front.
rng default % For reproducibility x = gamultiobj(fitnessfcn,2,A,b);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Plot the constrained solution and the linear constraint.
plot(x(:,1),x(:,2),"ko") t = linspace(-1/2,2); y = 1/2 - t; hold on plot(t,y,"b--") xlabel("x(1)") ylabel("x(2)") title("Pareto Points in Parameter Space") hold off
To see the effect of removing the linear constraint from this problem, see Simple Multiobjective Problem.
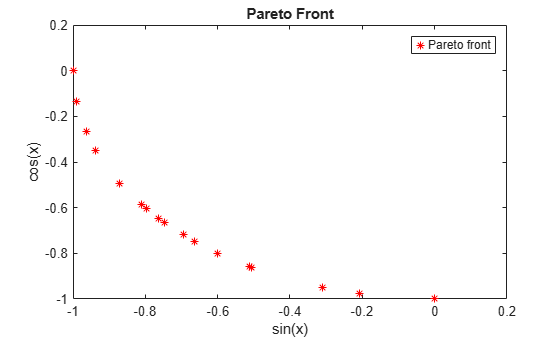
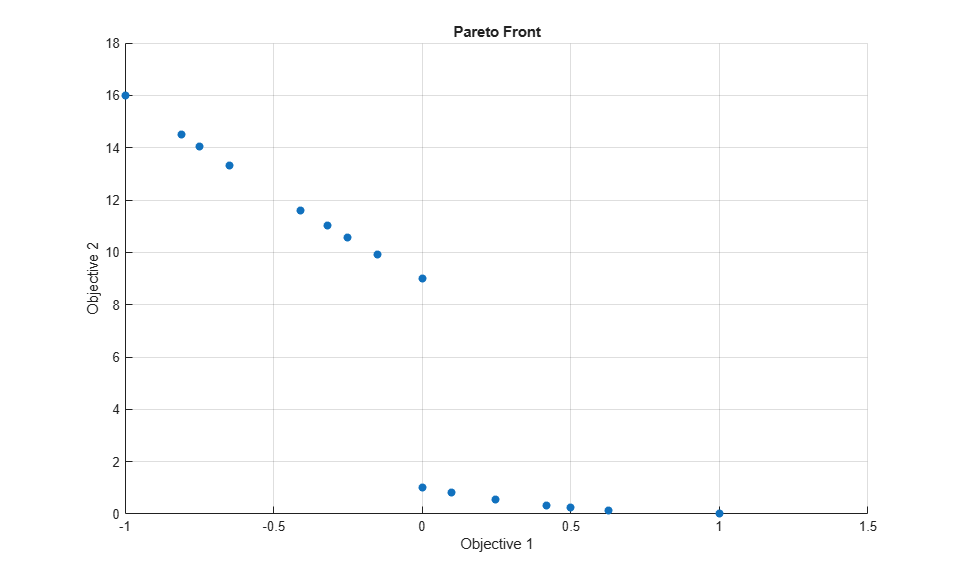
Find the Pareto front for the two fitness functions sin(x) and cos(x) on the interval .
fitnessfcn = @(x)[sin(x),cos(x)]; nvars = 1; lb = 0; ub = 2*pi; rng default % for reproducibility x = gamultiobj(fitnessfcn,nvars,[],[],[],[],lb,ub)
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
x = 18×1
4.7124
4.7124
3.1415
3.6733
3.9845
3.4582
3.9098
4.4409
4.0846
3.8686
4.1976
4.0093
4.5791
3.6800
4.0656
⋮
Plot the solution. gamultiobj finds points along the entire Pareto front.
plot(sin(x),cos(x),"r*") xlabel("sin(x)") ylabel("cos(x)") title("Pareto Front") legend("Pareto front")
Find and plot the Pareto front for the two-objective Schaffer's second function. This function has a disconnected Pareto front.
function y = schaffer2(x) % y has two columns % Initialize y for two objectives and for all x y = zeros(length(x),2); % Evaluate first objective. % This objective is piecewise continuous. for i = 1:length(x) if x(i) <= 1 y(i,1) = -x(i); elseif x(i) <=3 y(i,1) = x(i) -2; elseif x(i) <=4 y(i,1) = 4 - x(i); else y(i,1) = x(i) - 4; end end % Evaluate second objective y(:,2) = (x -5).^2; end
Plot the two objectives.
x = -1:0.1:8; y = schaffer2(x); plot(x,y(:,1),"r",x,y(:,2),"b"); xlabel("x") ylabel("schaffer2(x)") legend("Objective 1","Objective 2")
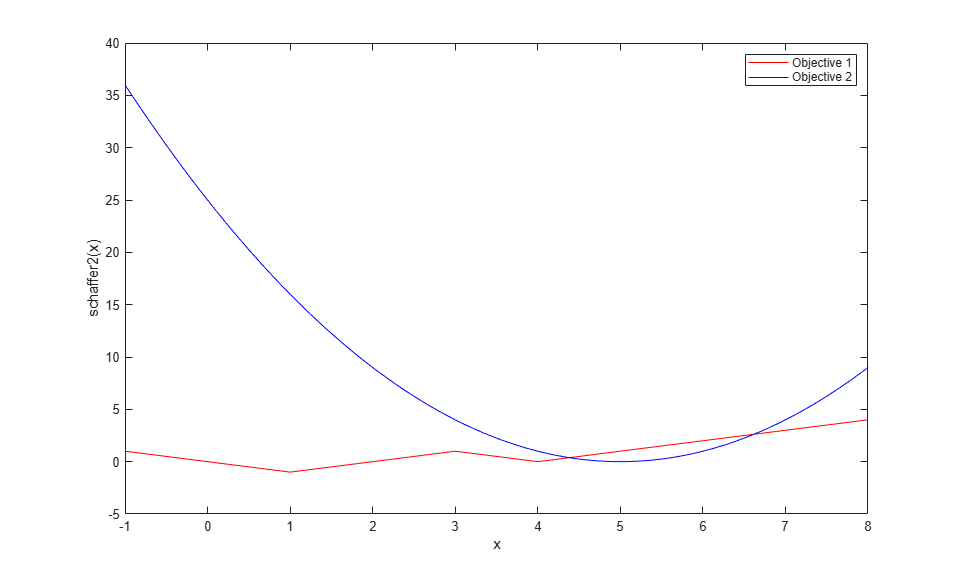
The two objective functions compete for x in the ranges [1,3] and [4,5]. But, the Pareto-optimal front consists of only two disconnected regions, corresponding to the x in the ranges [1,2] and [4,5]. There are disconnected regions because the region [2,3] is inferior to [4,5]. In that range, objective 1 has the same values, but objective 2 is smaller.
Set bounds to keep population members in the range  .
.
lb = -5; ub = 10;
Set options to view the Pareto front as gamultiobj runs.
options = optimoptions("gamultiobj",PlotFcn=@gaplotpareto);
Call gamultiobj.
rng default % For reproducibility [x,fval,exitflag,output] = gamultiobj(@schaffer2,1,[],[],[],[],lb,ub,options);
gamultiobj stopped because it exceeded options.MaxGenerations.
Create a two-objective function in two problem variables.
rng default % For reproducibility M = diag([-1 -1]) + randn(2)/4; % Two problem variables fun = @(x)[(x').^2 / 30 + M*x']; % Two objectives
Specify that the second variable must be an integer.
intcon = 2;
Specify problem bounds, the gaplotpareto plot function, and a population size of 100.
lb = [0 0]; ub = [100 50]; options = optimoptions("gamultiobj",PlotFcn="gaplotpareto",... PopulationSize=100);
Find the Pareto set for the problem.
nvars = 2; A = []; b = []; Aeq = []; beq = []; nonlcon = []; [x,fval] = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
List ten of the solutions, and notice that the second variable is integer-valued.
x(1:10,:)
ans = 10×2
8.3393 28.0000
12.9927 49.0000
7.1611 27.0000
7.0210 18.0000
0.0004 12.0000
9.0989 44.0000
9.3974 29.0000
0.5537 17.0000
6.4010 17.0000
7.0531 31.0000
Run a simple multiobjective problem and obtain all available outputs.
Set the random number generator for reproducibility.
rng default
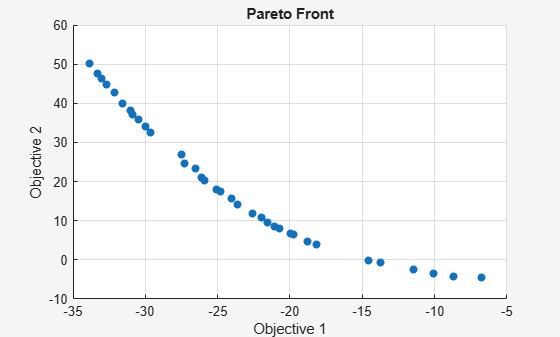
Set the fitness functions to kur_multiobjective, a function that has three control variables and returns two fitness function values.
fitnessfcn = @kur_multiobjective; nvars = 3;
The kur_multiobjective function has the following code.
function y = kur_multiobjective(x) %KUR_MULTIOBJECTIVE Objective function for a multiobjective problem. % The Pareto-optimal set for this two-objective problem is nonconvex as % well as disconnected. The function KUR_MULTIOBJECTIVE computes two % objectives and returns a vector y of size 2-by-1. % % Reference: Kalyanmoy Deb, "Multi-Objective Optimization using % Evolutionary Algorithms", John Wiley & Sons ISBN 047187339 % Copyright 2007 The MathWorks, Inc. % Initialize for two objectives y = zeros(2,1); % Compute first objective for i = 1:2 y(1) = y(1) - 10*exp(-0.2*sqrt(x(i)^2 + x(i+1)^2)); end % Compute second objective for i = 1:3 y(2) = y(2) + abs(x(i))^0.8 + 5*sin(x(i)^3); end
Set lower and upper bounds on all variables.
ub = [5 5 5]; lb = -ub;
Find the Pareto front and all other outputs for this problem.
[x,fval,exitflag,output,population,scores] = gamultiobj(fitnessfcn,nvars, ...
[],[],[],[],lb,ub);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Examine the sizes of some of the returned variables.
sizex = size(x) sizepopulation = size(population) sizescores = size(scores)
sizex =
18 3
sizepopulation =
50 3
sizescores =
50 2
The returned Pareto front contains 18 points. There are 50 members of the final population. Each population row has three dimensions, corresponding to the three decision variables. Each scores row has two dimensions, corresponding to the two fitness functions.
Input Arguments
Output Arguments
More About
A Pareto front is a set of points in parameter space (the space of decision variables) that have noninferior fitness function values.
In other words, for each point on the Pareto front, you can improve one fitness function only by degrading another. For details, see What Is Multiobjective Optimization?
As in Local vs. Global Optima, it is possible for a Pareto front to be local, but not global. “Local” means that the Pareto points can be noninferior compared to nearby points, but points farther away in parameter space could have lower function values in every component.
Algorithms
gamultiobj uses a controlled, elitist genetic algorithm (a variant of
NSGA-II [1]). An elitist GA always favors individuals with better fitness value (rank). A
controlled elitist GA also favors individuals that can help increase the diversity of
the population even if they have a lower fitness value. It is important to maintain the
diversity of population for convergence to an optimal Pareto front. Diversity is
maintained by controlling the elite members of the population as the algorithm
progresses. Two options, ParetoFraction and
DistanceMeasureFcn, control the elitism.
ParetoFraction limits the number of individuals on the Pareto
front (elite members). The distance function, selected by
DistanceMeasureFcn, helps to maintain diversity on a front by
favoring individuals that are relatively far away on the front. The algorithm stops if
the spread, a measure of the movement of the Pareto front, is
small. For details, see gamultiobj Algorithm.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for gamultiobj.
References
[1] Deb, Kalyanmoy. Multi-Objective Optimization Using Evolutionary Algorithms. Chichester, England: John Wiley & Sons, 2001.