Lane Detection on the GPU by Using the houghlines Function
This example shows how to generate CUDA® MEX for a MATLAB® function that can detect and output lane marker boundaries on an image. The example takes an RGB image as input and uses the ordfilt2 (Image Processing Toolbox), hough (Image Processing Toolbox), houghpeaks (Image Processing Toolbox), and houghlines (Image Processing Toolbox) functions that are part of Image Processing Toolbox™ to produce the lane-detected output image.
Third-Party Prerequisites
Required
This example generates CUDA MEX and has the following third-party requirements.
CUDA enabled NVIDIA® GPU and compatible driver.
Optional
For non-MEX builds such as static, dynamic libraries or executables, this example has the following additional requirements.
NVIDIA toolkit.
Environment variables for the compilers and libraries. For more information, see Third-Party Hardware and Setting Up the Prerequisite Products.
Verify GPU Environment
To verify that the compilers and libraries necessary for running this example are set up correctly, use the coder.checkGpuInstall function.
envCfg = coder.gpuEnvConfig('host');
envCfg.BasicCodegen = 1;
envCfg.Quiet = 1;
coder.checkGpuInstall(envCfg);The lane_detection_houghlines Entry-Point Function
The lane_detection_houghlines.m entry-point function takes an intensity image as input and returns the lane-detected image.
type lane_detection_houghlinesfunction [lines] = lane_detection_houghlines(inputImage)%#codegen % Copyright 2019-2021 The MathWorks, Inc. coder.gpu.kernelfun; % Convert RGB image to grayscale image. grayImage = im2gray(inputImage); % Edge detection using ordfilt2. input = grayImage(240:end,1:end); dom = ones(2); minOrder = 1; maxOrder = 4; padopt = 'zeros'; MinImg = ordfilt2(input,minOrder,dom,padopt); MaxImg = ordfilt2(input,maxOrder,dom,padopt); % Edge detected output. outImage = MaxImg - MinImg; BW = imbinarize(outImage); [H,T,R] = hough(BW); P = houghpeaks(H,20,'threshold',1); lines = houghlines(BW,T,R,P,'FillGap',200,'MinLength',150);
Generate CUDA MEX for the lane_detection_houghlines Function
Create a GPU code configuration object and run the codegen function.
inputImage = imread('highway.png'); inputResizedImage = imresize(inputImage,[480 640]); cfg = coder.gpuConfig('mex'); codegen -args {inputResizedImage} -config cfg lane_detection_houghlines
Code generation successful: View report
Run the Generated CUDA MEX
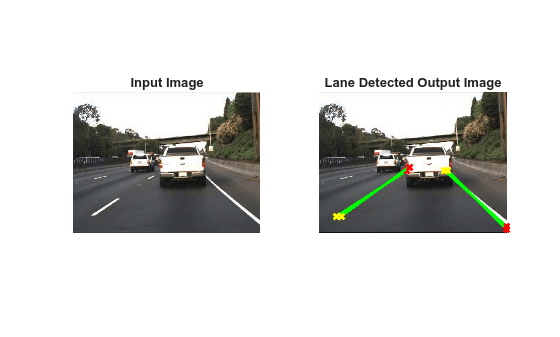
Run the generated lane_detection_houghlines_mex with an input image and plot the input and lane-detected images.
[lines] = lane_detection_houghlines_mex(inputResizedImage); % Plot images. inputImageVGAsize = imresize(inputImage,[480 640]); outputImage = imresize(inputImage,[480 640]); p1 = subplot(1, 2, 1); p2 = subplot(1, 2, 2); imshow(inputImageVGAsize, 'Parent', p1); imshow(outputImage, 'Parent', p2);hold on max_len = 0; for k = 1:length(lines) if ((lines(k).theta <= 60 && lines(k).theta >10)||... (lines(k).theta <= -10 && lines(k).theta > -50) ) xy = [lines(k).point1; (lines(k).point2)]; plot(xy(:,1),xy(:,2)+240,'LineWidth',2,'Color','green'); % Plot beginning and end of lines. plot(xy(1,1),xy(1,2)+240,'x','LineWidth',2,'Color','yellow'); plot(xy(2,1),xy(2,2)+240,'x','LineWidth',2,'Color','red'); % Determine the endpoints of the longest line segment. len = norm(lines(k).point1 - lines(k).point2); if ( len > max_len) max_len = len; xy_long = xy; end end end title(p1, 'Input Image'); title(p2, 'Lane Detected Output Image');
See Also
Functions
codegen|coder.gpu.kernel|coder.gpu.kernelfun|gpucoder.matrixMatrixKernel|coder.gpu.constantMemory|stencilfun|coder.checkGpuInstall