imregister
Intensity-based image registration
Syntax
Description
moving_reg = imregister(moving,fixed,transformType,optimizer,metric)moving, so that it
is registered with the reference image, fixed.
transformType defines the type of transformation to
perform. metric defines the quantitative measure of similarity
between the images to optimize. optimizer describes the method
for optimizing the metric. The function returns the registered image,
moving_reg.
[
transforms the spatially referenced image moving_reg,R_reg]
= imregister(moving,Rmoving,fixed,Rfixed,transformType,optimizer,metric)moving so that it is
registered with the spatially referenced image fixed.
Rmoving and Rfixed are spatial
referencing objects that describe the world coordinate limits and the resolution of
moving and fixed.
___ = imregister(___,
specifies additional options with one or more name-value pair arguments.Name,Value)
Examples
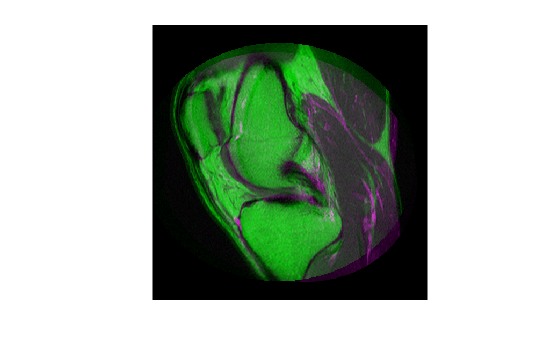
Read two images. This example uses two magnetic resonance (MRI) images of a knee. The fixed image is a spin echo image, while the moving image is a spin echo image with inversion recovery. The two sagittal slices were acquired at the same time but are slightly out of alignment.
fixed = dicomread("knee1.dcm"); moving = dicomread("knee2.dcm");
View the misaligned images.
imshowpair(fixed,moving,"Scaling","joint")
Create the optimizer and metric, specifying the modality as "multimodal" because the images come from different sensors.
[optimizer,metric] = imregconfig("multimodal")optimizer =
registration.optimizer.OnePlusOneEvolutionary
Properties:
GrowthFactor: 1.050000e+00
Epsilon: 1.500000e-06
InitialRadius: 6.250000e-03
MaximumIterations: 100
metric =
registration.metric.MattesMutualInformation
Properties:
NumberOfSpatialSamples: 500
NumberOfHistogramBins: 50
UseAllPixels: 1
Tune the properties of the optimizer to get the problem to converge on a global maxima and to allow for more iterations.
optimizer.InitialRadius = 0.009; optimizer.Epsilon = 1.5e-4; optimizer.GrowthFactor = 1.01; optimizer.MaximumIterations = 300;
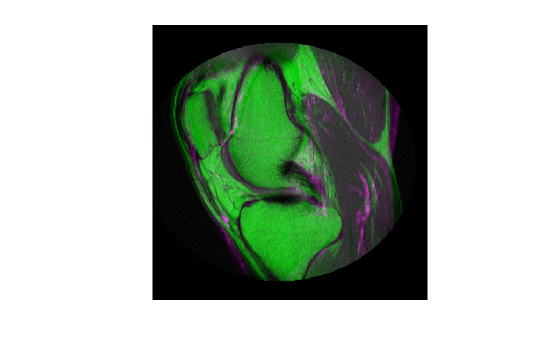
Perform the registration.
movingRegistered = imregister(moving,fixed,"affine",optimizer,metric);View the registered images.
imshowpair(fixed,movingRegistered,"Scaling","joint")
Input Arguments
Name-Value Arguments
Output Arguments
Tips
Both
imregtformandimregisteruse the same underlying registration algorithm.imregisterperforms the additional step of resamplingmovingto produce the registered output image from the geometric transformation estimate calculated byimregtform. Useimregtformwhen you want access to the geometric transformation that relatesmovingtofixed. Useimregisterwhen you want a registered output image.Create an
optimizerandmetricwith theimregconfigfunction before callingimregister. Getting good results from optimization-based image registration usually requires modifying optimizer or metric settings for the pair of images being registered. Theimregconfigfunction provides a default configuration that should only be considered a starting point. For example, if you increase the number of iterations in the optimizer, reduce the optimizer step size, or change the number of samples in a stochastic metric, the registration improves to a point, at the expense of performance. See the output ofimregconfigfor more information on the different parameters that you can modify.If the spatial scaling of your images differs by more than 10%, resize them with
imresizebefore registering them.Use
imshowpairorimfuseto visualize the results of registration.You can use
imregisterin an automated workflow to register several images.When you have spatial referencing information about the image to be registered, specify the information to
imregisterusing spatial referencing objects. This helpsimregisterconverge to better results more quickly because scale differences can be taken into account.
Version History
Introduced in R2012aSee Also
Apps
Functions
imregconfig|imregcorr|imregtform|imwarp|imshowpair|imfuse|imregicp(Medical Imaging Toolbox)