Point Cloud Analyzer
Description
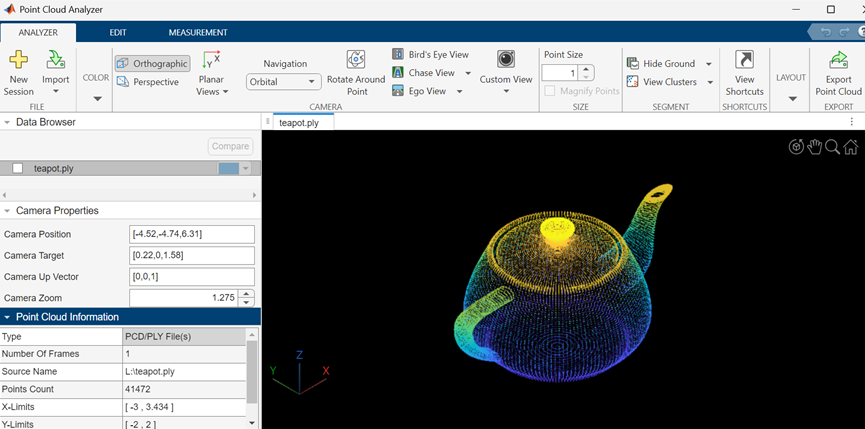
The Point Cloud Analyzer app enables you to visualize, analyze, and preprocess point cloud data. The app provides these features:
Load and visualize point cloud data. The app can import
pointCloudobjects from the workspace and read point cloud data from PLY, PCAP, LAS, LAZ, PCD, E57, rosbag files, or any custom source. You can export the processed point clouds as PCD, PLY, LAS, or LAZ files.Measure point cloud attributes such as distance, elevation, location, and volume.
View and analyze point cloud data using the built-in camera views, color maps, and clustering options. You can also create and save custom camera views.
Use built-in preprocessing algorithms to denoise, downsample, filter, crop, and remove ground from point cloud data.
Create and import custom preprocessing algorithms to edit point clouds. You can also create a user interface to interactively tune the algorithm parameters.
Export the preprocessing operations performed on a point cloud as a MATLAB® function to reuse them.
Compare two or more point clouds using an overlay and compute point-to-point and point-to-plane metrics between them.
Open the Point Cloud Analyzer App
MATLAB Toolstrip: On the Apps tab, click on the app icon under the Image Processing and Computer Vision section.
MATLAB command window: Enter
pointCloudAnalyzer. This opens a new session of the Point Cloud Analyzer app.
Examples
Parameters
Programmatic Use
Version History
Introduced in R2021bSee Also
Apps
Functions
pcshow|pointCloud|pcdownsample|pcmedian|pcdenoise|pcorganize|segmentGroundSMRF|pcfitplane|segmentGroundFromLidarData