filter2
2-D digital filter
Description
Examples
You can digitally filter images and other 2-D data using the filter2 function, which is closely related to the conv2 function.
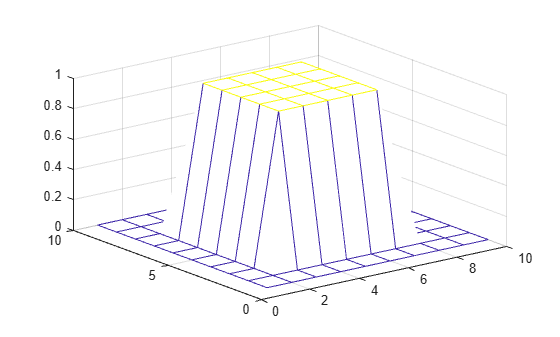
Create and plot a 2-D pedestal with interior height equal to one.
A = zeros(10); A(3:7,3:7) = ones(5); mesh(A)
Filter the data in A according to a filter coefficient matrix H, and return the full matrix of filtered data.
H = [1 2 1; 0 0 0; -1 -2 -1];
Y = filter2(H,A,'full');
mesh(Y)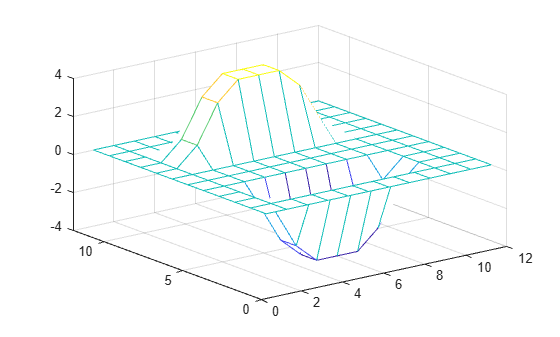
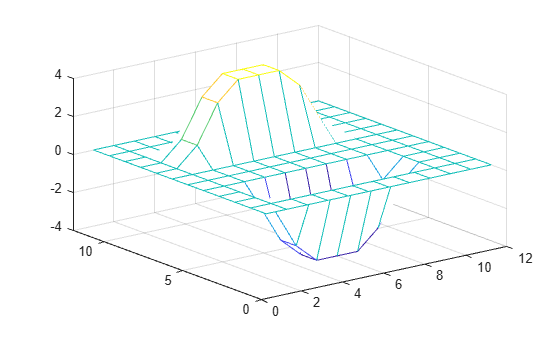
Rotate H 180 degrees and convolve the result with A. The output is equivalent to filtering the data in A with the coefficients in H.
C = conv2(A,rot90(H,2)); mesh(C)
Input Arguments
Algorithms
The filter2 function filters data by taking
the 2-D convolution of the input X and the coefficient
matrix H rotated 180 degrees. Specifically, filter2(H,X,shape) is
equivalent to conv2(X,rot90(H,2),shape).
Extended Capabilities
Version History
Introduced before R2006a