filter
1-D digital filter
Description
y = filter(b,a,x)x using a rational transfer function defined
by the numerator and denominator coefficients b and a.
If a(1) is not equal to 1,
then filter normalizes the filter coefficients
by a(1). Therefore, a(1) must
be nonzero.
If
xis a vector, thenfilterreturns the filtered data as a vector of the same size asx.If
xis a matrix, thenfilteracts along the first dimension and returns the filtered data for each column.If
xis a multidimensional array, thenfilteracts along the first array dimension whose size does not equal 1.
Examples
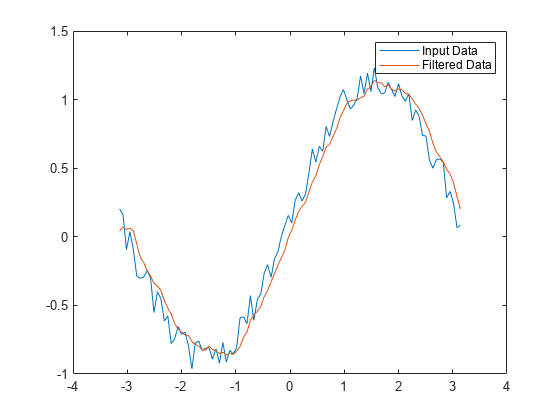
A moving-average filter is a common method used for smoothing noisy data. This example uses the filter function to compute averages along a vector of data.
Create a 1-by-100 row vector of sinusoidal data that is corrupted by random noise.
t = linspace(-pi,pi,100); rng default %initialize random number generator x = sin(t) + 0.25*rand(size(t));
A moving-average filter slides a window of length along the data, computing averages of the data contained in each window. The following difference equation defines a moving-average filter of a vector :
For a window size of 5, compute the numerator and denominator coefficients for the rational transfer function.
windowSize = 5; b = (1/windowSize)*ones(1,windowSize); a = 1;
Find the moving average of the data and plot it against the original data.
y = filter(b,a,x); plot(t,x) hold on plot(t,y) legend('Input Data','Filtered Data')
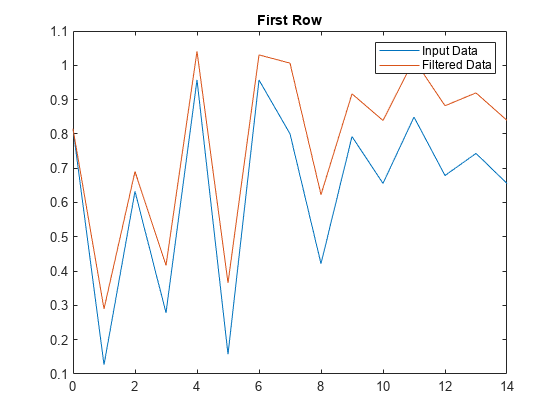
This example filters a matrix of data with the following rational transfer function.
Create a 2-by-15 matrix of random input data.
rng default %initialize random number generator x = rand(2,15);
Define the numerator and denominator coefficients for the rational transfer function.
b = 1; a = [1 -0.2];
Apply the transfer function along the second dimension of x and return the 1-D digital filter of each row. Plot the first row of original data against the filtered data.
y = filter(b,a,x,[],2); t = 0:length(x)-1; %index vector plot(t,x(1,:)) hold on plot(t,y(1,:)) legend('Input Data','Filtered Data') title('First Row')
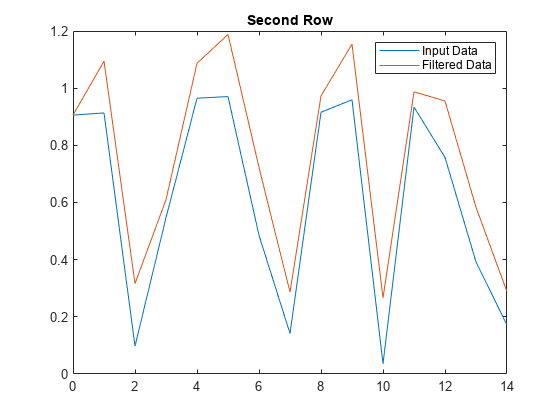
Plot the second row of input data against the filtered data.
figure plot(t,x(2,:)) hold on plot(t,y(2,:)) legend('Input Data','Filtered Data') title('Second Row')
Define a moving-average filter with a window size of 3.
windowSize = 3; b = (1/windowSize)*ones(1,windowSize); a = 1;
Find the 3-point moving average of a 1-by-6 row vector of data.
x = [2 1 6 2 4 3]; y = filter(b,a,x)
y = 1×6
0.6667 1.0000 3.0000 3.0000 4.0000 3.0000
By default, the filter function initializes the filter delays as zero, assuming that both past inputs and outputs are zero. In this case, the first two elements of y are the 3-point moving average of the first element and the first two elements of x, respectively. In other words, the first element 0.6667 is the 3-point average of 2, and the second element 1 is the 3-point average of 2 and 1.
To include additional past inputs and outputs in your data, specify the initial conditions as the filter delays. These initial conditions for the present inputs are the final conditions that are obtained from applying the same transfer function to the past inputs (and past outputs). For example, include past inputs of [1 3]. Without filter delays, the past outputs are (0+0+1)/3 and (0+1+3)/3.
x_past = [1 3]; y_past = filter(b,a,x_past)
y_past = 1×2
0.3333 1.3333
However, you can continue applying the same transfer function to generate further nonzero outputs, assuming that the tails of these past inputs are zero. These further outputs are (1+3+0)/3 and (3+0+0)/3, which represent the final conditions obtained from the past inputs. To compute these final conditions, specify the second output argument of the filter function.
[y_past,zf] = filter(b,a,x_past)
y_past = 1×2
0.3333 1.3333
zf = 2×1
1.3333
1.0000
To include the past inputs in the present data, specify the filter delays by using the fourth input argument of the filter function. Use the final conditions from the past data as the initial conditions for the present data.
y = filter(b,a,x,zf)
y = 1×6
2.0000 2.0000 3.0000 3.0000 4.0000 3.0000
In this case, the first element of y becomes the 3-point moving average of 1, 3, and 2, which is 2, and the second element of y becomes the moving average of 3, 2, and 1, which is 2.
Use initial and final conditions for filter delays to filter data in sections, especially if memory limitations are a consideration.
Generate a large random data sequence and split it into two segments, x1 and x2.
x = randn(10000,1); x1 = x(1:5000); x2 = x(5001:end);
The whole sequence, x, is the vertical concatenation of x1 and x2.
Define the numerator and denominator coefficients for the rational transfer function,
b = [2,3]; a = [1,0.2];
Filter the subsequences x1 and x2 one at a time. Output the final conditions from filtering x1 to store the internal status of the filter at the end of the first segment.
[y1,zf] = filter(b,a,x1);
Use the final conditions from filtering x1 as initial conditions to filter the second segment, x2.
y2 = filter(b,a,x2,zf);
y1 is the filtered data from x1, and y2 is the filtered data from x2. The entire filtered sequence is the vertical concatenation of y1 and y2.
Filter the entire sequence simultaneously for comparison.
y = filter(b,a,x); isequal(y,[y1;y2])
ans = logical
1
Input Arguments
Numerator coefficients of the rational transfer function, specified as a vector.
Data Types: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Complex Number Support: Yes
Denominator coefficients of the rational transfer function, specified as a vector.
Data Types: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Complex Number Support: Yes
Input data, specified as a vector, matrix, or multidimensional array.
Data Types: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Complex Number Support: Yes
Initial conditions for filter delays, specified as a vector, matrix, or multidimensional array.
If
ziis a vector, then its length must bemax(length(a),length(b))-1.If
ziis a matrix or multidimensional array, then the size of the leading dimension must bemax(length(a),length(b))-1. The size of each remaining dimension must match the size of the corresponding dimension ofx. For example, consider usingfilteralong the second dimension (dim = 2) of a 3-by-4-by-5 arrayx. The arrayzimust have size[max(length(a),length(b))-1]-by-3-by-5.
The default value, specified by [], initializes
all filter delays to zero.
Data Types: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Complex Number Support: Yes
Dimension to operate along, specified as a positive integer scalar. If you do not specify the dimension, then the default is the first array dimension whose size does not equal 1.
Consider a two-dimensional input array, x.
If
dim = 1, thenfilter(b,a,x,zi,1)operates along the columns ofxand returns the filter applied to each column.
If
dim = 2, thenfilter(b,a,x,zi,2)operates along the rows ofxand returns the filter applied to each row.
If dim is greater than ndims(x), then
filter considers x as if it has
additional dimensions up to dim with sizes of 1. For
example, if x is a matrix with a size of 2-by-3 and
dim = 3, then filter operates
along the third dimension of x as if it has the size of
2-by-3-by-1.
Data Types: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Output Arguments
More About
Tips
To use the
filterfunction with thebcoefficients from an FIR filter, usey = filter(b,1,x).If you have Signal Processing Toolbox™, use
y = filter(d,x)to filter an input signalxwith adigitalFilter(Signal Processing Toolbox) objectd. To generatedbased on frequency-response specifications, usedesignfilt(Signal Processing Toolbox).See Digital Filtering (Signal Processing Toolbox) for more on filtering functions.
References
[1] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1999.