shortestpathtree
Shortest path tree from node
Syntax
Description
TR = shortestpathtree(G,s)TR, that contains the tree of shortest
paths from source node s to all other nodes in the graph. If the
graph is weighted (that is, G.Edges contains a variable
Weight), then those weights are used as the distances along
the edges in the graph. Otherwise, all edge distances are taken to be
1.
TR = shortestpathtree(___,Name,Value)shortestpathtree(G,s,'OutputForm','vector') returns a numeric
vector that describes the shortest path tree.
Examples
Find the shortest paths from a source node to each of the other reachable nodes in a graph, and plot the results.
Create a directed graph.
s = [1 1 2 3 3 4 4 6 6 7 8 7 5]; t = [2 3 4 4 5 5 6 1 8 1 3 2 8]; G = digraph(s,t)
G =
digraph with properties:
Edges: [13×1 table]
Nodes: [8×0 table]
Calculate the shortest paths from node 1 to each of the other reachable nodes in the graph. Then, plot the resulting tree on top of the graph.
TR = shortestpathtree(G,1); p = plot(G); highlight(p,TR,'EdgeColor','r')
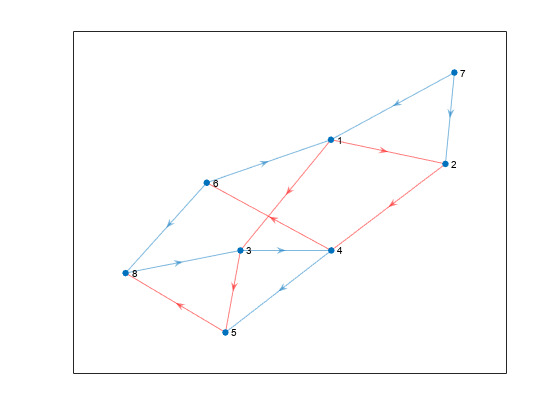
Since there is no path from node 1 to node 7, node 7 is disconnected from the tree.
Find the shortest paths from each node in a graph to a target node, and plot the results.
Create and plot a graph.
s = [1 1 1 1 1 1 1 2 2 7 7 7 7 9 9 3 3 1 6 4 8 10 6 8 4 5]; t = [2 3 4 5 6 8 7 6 7 5 6 8 9 6 8 6 10 10 10 10 10 11 11 11 8 8]; G = graph(s,t); x = [0 0.5 -0.5 -0.5 0.5 0 1.5 0 2 -1.5 -2]; y = [0 0.5 0.5 -0.5 -0.5 2 0 -2 0 0 0]; plot(G,'XData',x,'YData',y)
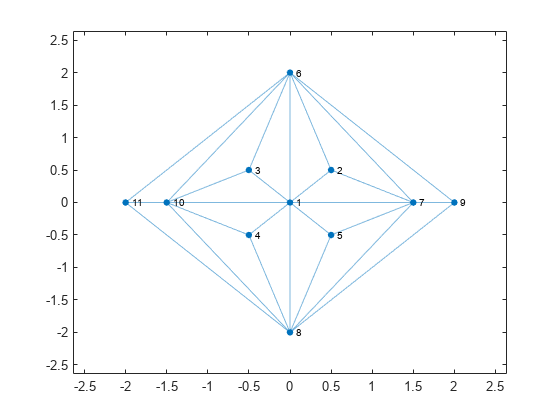
Find the shortest paths from each node in the graph to node 10. Plot the resulting tree.
TR = shortestpathtree(G,'all',10);
plot(TR)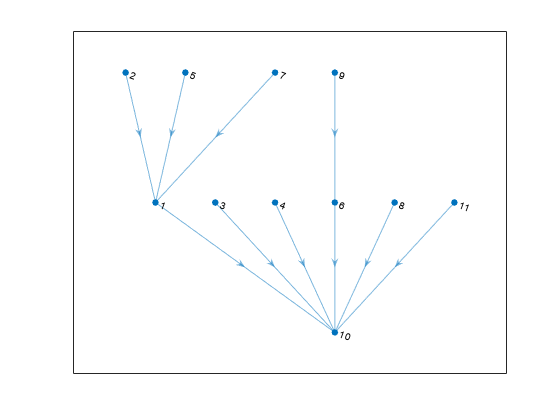
Find the shortest paths and path lengths from a single source node to several target nodes.
Create and plot a graph.
G = digraph(bucky); plot(G)
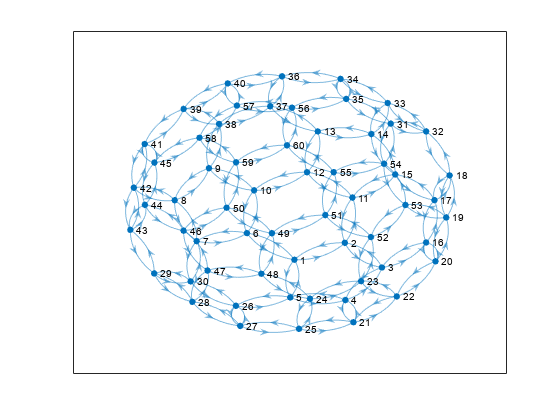
Find the shortest paths from node 23 to several other nodes. Specify OutputForm as cell to return the shortest paths in a cell array. Specify two outputs to also return the shortest path distances.
target = [1 5 13 32 44]; [TR,D] = shortestpathtree(G,23,target,'OutputForm','cell')
TR=5×1 cell array
{[ 23 22 21 4 5 1]}
{[ 23 22 21 4 5]}
{[23 22 20 16 17 15 14 13]}
{[ 23 22 20 19 18 32]}
{[ 23 24 48 47 46 44]}
D = 1×5
5 4 7 5 5
tree{j} is the shortest path from node 23 to node target(j) with length D(j).
Find the path and path length from node 21 to node 5.
path = TR{2}path = 1×5
23 22 21 4 5
path_length = D(2)
path_length = 4
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The
shortestpath,shortestpathtree, anddistancesfunctions do not support undirected graphs with negative edge weights, or more generally any graph containing a negative cycle, for these reasons:A negative cycle is a path that leads from a node back to itself, with the sum of the edge weights on the path being negative. If a negative cycle is on a path between two nodes, then no shortest path exists between the nodes, since a shorter path can always be found by traversing the negative cycle.
A single negative edge weight in an undirected graph creates a negative cycle.
Extended Capabilities
Version History
Introduced in R2015b
See Also
shortestpath | distances | nearest | graph | digraph