ode23
Solve nonstiff differential equations — low order method
Syntax
Description
[,
where t,y] =
ode23(odefun,tspan,y0)tspan = [t0 tf], integrates the system of
differential equations from t0 to tf with
initial conditions y0. Each row in the solution
array y corresponds to a value returned in column
vector t.
All MATLAB® ODE solvers can solve systems of equations of
the form ,
or problems that involve a mass matrix, .
The solvers all use similar syntaxes. The ode23s solver
only can solve problems with a mass matrix if the mass matrix is constant. ode15s and ode23t can
solve problems with a mass matrix that is singular, known as differential-algebraic
equations (DAEs). Specify the mass matrix using the Mass option
of odeset.
[ additionally
finds where functions of (t,y),
called event functions, are zero. In the output, t,y,te,ye,ie]
= ode23(odefun,tspan,y0,options)te is
the time of the event, ye is the solution at the
time of the event, and ie is the index of the triggered
event.
For each event function, specify whether the integration is
to terminate at a zero and whether the direction of the zero crossing
matters. Do this by setting the 'Events' property
to a function, such as myEventFcn or @myEventFcn,
and creating a corresponding function: [value,isterminal,direction]
= myEventFcn(t,y).
For more information, see ODE Event Location.
sol = ode23(___)deval to evaluate
the solution at any point on the interval [t0 tf].
You can use any of the input argument combinations in previous syntaxes.
Examples
ODE with Single Solution Component
Simple ODEs that have a single solution component can be specified as an anonymous function in the call to the solver. The anonymous function must accept two inputs (t,y), even if one of the inputs is not used in the function.
Solve the ODE
Specify a time interval of [0 5] and the initial condition y0 = 0.
tspan = [0 5]; y0 = 0; [t,y] = ode23(@(t,y) 2*t, tspan, y0);
Plot the solution.
plot(t,y,'-o')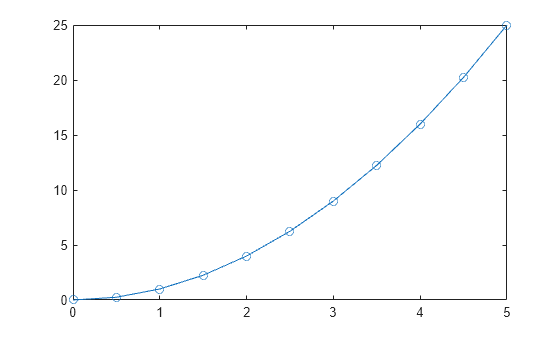
Solve Nonstiff Equation
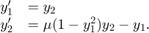
The van der Pol equation is a second-order ODE

where  is a scalar parameter. Rewrite this equation as a system of first-order ODEs by making the substitution
is a scalar parameter. Rewrite this equation as a system of first-order ODEs by making the substitution  . The resulting system of first-order ODEs is
. The resulting system of first-order ODEs is
The function file vdp1.m represents the van der Pol equation using  . The variables
. The variables  and
and  are the entries
are the entries y(1) and y(2) of a two-element vector dydt.
function dydt = vdp1(t,y) %VDP1 Evaluate the van der Pol ODEs for mu = 1 % % See also ODE113, ODE23, ODE45. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2014 The MathWorks, Inc. dydt = [y(2); (1-y(1)^2)*y(2)-y(1)];
Solve the ODE using the ode23 function on the time interval [0 20] with initial values [2 0]. The resulting output is a column vector of time points t and a solution array y. Each row in y corresponds to a time returned in the corresponding row of t. The first column of y corresponds to , and the second column corresponds to .
[t,y] = ode23(@vdp1,[0 20],[2; 0]);
Plot the solutions for and against t.
plot(t,y(:,1),'-o',t,y(:,2),'-o') title('Solution of van der Pol Equation (\mu = 1) with ODE23'); xlabel('Time t'); ylabel('Solution y'); legend('y_1','y_2')
Pass Extra Parameters to ODE Function
ode23 only works with functions that use two input arguments, t and y. However, you can pass in extra parameters by defining them outside the function and passing them in when you specify the function handle.
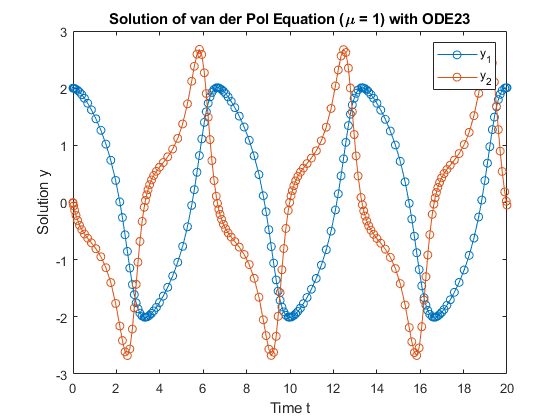
Solve the ODE

Rewriting the equation as a first-order system yields

odefcn.m represents this system of equations as a function that accepts four input arguments: t, y, A, and B.
function dydt = odefcn(t,y,A,B)
dydt = zeros(2,1);
dydt(1) = y(2);
dydt(2) = (A/B)*t.*y(1);
Solve the ODE using ode23. Specify the function handle such that it passes in the predefined values for A and B to odefcn.
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode23(@(t,y) odefcn(t,y,A,B), tspan, y0);
Plot the results.
plot(t,y(:,1),'-o',t,y(:,2),'-.')
ODE with Crude Error Threshold
Compared to ode45, the ode23 solver is better at solving problems with crude error tolerances.
Compare the performance of ode45 and ode23 by solving the moderately-stiff ODE
for . This ODE is a test equation that becomes increasingly stiff as increases. Use odeset to turn on the display of solver statistics.
opts = odeset('Stats','on'); tspan = [0 2]; y0 = 1; lambda = 1e3; subplot(1,2,1) tic, ode45(@(t,y) -lambda*y, tspan, y0, opts), toc
615 successful steps 35 failed attempts 3901 function evaluations Elapsed time is 1.885385 seconds.
title('ode45')
subplot(1,2,2)
tic, ode23(@(t,y) -lambda*y, tspan, y0, opts), toc822 successful steps 2 failed attempts 2473 function evaluations Elapsed time is 1.240747 seconds.
title('ode23')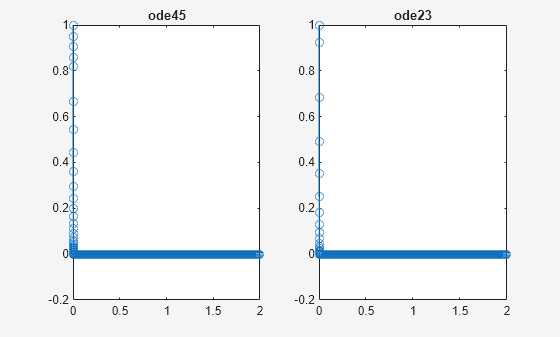
For this moderately stiff problem, ode23 executes slightly faster than ode45 and also has fewer failed steps. The step sizes taken by ode45 and ode23 for this problem are limited by the stability requirements of the equation rather than by accuracy. Since steps taken by ode23 are cheaper than with ode45, the ode23 solver executes quicker even though it takes more steps.
Input Arguments
Output Arguments
Algorithms
ode23 is an implementation of an explicit
Runge-Kutta (2,3) pair of Bogacki and Shampine. It may be more efficient
than ode45 at crude tolerances and in the presence
of moderate stiffness. ode23 is a single-step
solver [1], [2].
References
[1] Bogacki, P. and L. F. Shampine, “A 3(2) pair of Runge-Kutta formulas,” Appl. Math. Letters, Vol. 2, 1989, pp. 321–325.
[2] Shampine, L. F. and M. W. Reichelt, “The MATLAB ODE Suite,” SIAM Journal on Scientific Computing, Vol. 18, 1997, pp. 1–22.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)