fmincon Interior-Point Algorithm with Analytic Hessian
This example shows how to use derivative information to make the solution process faster and more robust. The fmincon interior-point algorithm can accept a Hessian function as an input. When you supply a Hessian, you can obtain a faster, more accurate solution to a constrained minimization problem.
The helper function bigtoleft is an objective function that grows rapidly negative as the x(1) coordinate becomes negative. Its gradient is a three-element vector. The code for the bigtoleft helper function appears at the end of this example.
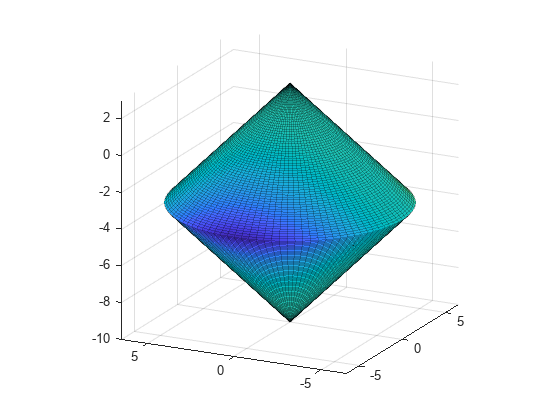
The constraint set for this example is the intersection of the interiors of two cones—one pointing up, and one pointing down. The constraint function is a two-component vector containing one component for each cone. Because this example is three-dimensional, the gradient of the constraint is a 3-by-2 matrix. The code for the twocone helper function appears at the end of this example.
Create a figure of the constraints, colored using the objective function.
% Create figure figure1 = figure; % Create axes axes1 = axes(Parent=figure1); view([-63.5 18]); grid("on"); hold("on"); % Set up polar coordinates and two cones r=0:.1:6.5; th=2*pi*(0:.01:1); x=r'*cos(th); y=r'*sin(th); z=-10+sqrt(x.^2+y.^2); zz=3-sqrt(x.^2+y.^2); % Evaluate objective function on cone surfaces newxf=reshape(bigtoleft([x(:),y(:),z(:)]),66,101)/3000; newxg=reshape(bigtoleft([x(:),y(:),z(:)]),66,101)/3000; % Create lower surf with color set by objective surf(x,y,z,newxf,Parent=axes1,EdgeAlpha=0.25); % Create upper surf with color set by objective surf(x,y,zz,newxg,Parent=axes1,EdgeAlpha=0.25); axis equal
Create Hessian Function
To use second-order derivative information in the fmincon solver, you must create a Hessian that is the Hessian of the Lagrangian. The Hessian of the Lagrangian is given by the equation
Here, is the bigtoleft function, and the are the two cone constraint functions. The hessinterior helper function at the end of this example computes the Hessian of the Lagrangian at a point x with the Lagrange multiplier structure lambda. The function first computes . It then computes the two constraint Hessians and , multiplies them by their corresponding Lagrange multipliers lambda.ineqnonlin(1) and lambda.ineqnonlin(2), and adds them. You can see from the definition of the twocone constraint function that , which simplifies the calculation.
Create Options to Use Derivatives
To enable fmincon to use the objective gradient, constraint gradients, and Hessian, you must set appropriate options. The HessianFcn option using the Hessian of the Lagrangian is available only for the interior-point algorithm.
options = optimoptions("fmincon",Algorithm="interior-point",... SpecifyConstraintGradient=true,SpecifyObjectiveGradient=true,... HessianFcn=@hessinterior);
Minimize Using All Derivative Information
Set the initial point x0 = [-1,-1,-1].
x0 = [-1,-1,-1];
The problem has no linear constraints or bounds. Set those arguments to [].
A = []; b = []; Aeq = []; beq = []; lb = []; ub = [];
Solve the problem.
[x,fval,eflag,output] = fmincon(@bigtoleft,x0,...
A,b,Aeq,beq,lb,ub,@twocone,options);Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
Examine Solution and Solution Process
Examine the solution, objective function value, exit flag, and number of function evaluations and iterations.
disp(x)
-6.5000 -0.0000 -3.5000
disp(fval)
-2.8941e+03
disp(eflag)
1
disp([output.funcCount,output.iterations])
7 6
If you do not use a Hessian function, fmincon takes more iterations to converge and requires more function evaluations.
options.HessianFcn = [];
[x2,fval2,eflag2,output2] = fmincon(@bigtoleft,x0,...
A,b,Aeq,beq,lb,ub,@twocone,options);Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
disp([output2.funcCount,output2.iterations])
13 9
If you also do not include the gradient information, fmincon takes the same number of iterations, but requires many more function evaluations.
options.SpecifyConstraintGradient = false;
options.SpecifyObjectiveGradient = false;
[x3,fval3,eflag3,output3] = fmincon(@bigtoleft,x0,...
A,b,Aeq,beq,lb,ub,@twocone,options);Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
disp([output3.funcCount,output3.iterations])
43 9
Helper Functions
This code creates the bigtoleft helper function.
function [f,gradf] = bigtoleft(x) % This is a simple function that grows rapidly negative % as x(1) becomes negative % f = 10*x(:,1).^3+x(:,1).*x(:,2).^2+x(:,3).*(x(:,1).^2+x(:,2).^2); if nargout > 1 gradf=[30*x(1)^2+x(2)^2+2*x(3)*x(1); 2*x(1)*x(2)+2*x(3)*x(2); (x(1)^2+x(2)^2)]; end end
This code creates the twocone helper function.
function [ineqnonlin,eqnonlin,gineqnonlin,geqnonlin] = twocone(x) % This constraint is two cones, z > -10 + r % and z < 3 - r eqnonlin = []; r = sqrt(x(1)^2 + x(2)^2); ineqnonlin = [-10+r-x(3); x(3)-3+r]; if nargout > 2 geqnonlin = []; gineqnonlin = [x(1)/r,x(1)/r; x(2)/r,x(2)/r; -1,1]; end end
This code creates the hessinterior helper function.
function h = hessinterior(x,lambda) h = [60*x(1)+2*x(3),2*x(2),2*x(1); 2*x(2),2*(x(1)+x(3)),2*x(2); 2*x(1),2*x(2),0];% Hessian of f r = sqrt(x(1)^2+x(2)^2);% radius rinv3 = 1/r^3; hesscons = [(x(2))^2*rinv3,-x(1)*x(2)*rinv3,0; -x(1)*x(2)*rinv3,x(1)^2*rinv3,0; 0,0,0];% Hessian of both ineqnonlin(1) and ineqnonlin(2) h = h + lambda.ineqnonlin(1)*hesscons + lambda.ineqnonlin(2)*hesscons; end