step
System object: phased.GCCEstimator
Namespace: phased
Estimate direction of arrival using generalized cross-correlation
Syntax
Description
Note
Starting in R2016b, instead of using the step method
to perform the operation defined by the System object™, you can
call the object with arguments, as if it were a function. For example, y
= step(obj,x) and y = obj(x) perform
equivalent operations.
ang = step(sGCC,X)ang, of an input signal
X. The argument X is a matrix specifying the received
signals at the elements of the array specified in the SensorArray property.
Signals propagate from a single source. Each column in X corresponds to the
elements in the array (if an array is used) or the number of subarrays (if a subarray is used).
Each row of X represents a single time snapshot.
[
returns the estimated correlations, ang,R,lag]
= step(sGCC,X)R, between pairs of sensors, when you
set the CorrelationOutputPort property to true. R is a
matrix with P columns where P is the number of sensor
pairs. Each column in R contains the correlation for the corresponding pair
of sensors. lag is a column vector containing the time lags corresponding
to the rows of the correlation matrix. The time lags are the same for all sensor pairs.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
Output Arguments
Examples
Estimate the direction of arrival of a signal using GCC-PHAT. The receiving array is a 5-by-5-element URA microphone array with elements spaced 25 cm apart. Choose 10 element pairs to compute the arrival angle. Assume the speed of sound in air is 340 m/sec. The arriving signal is a sequence of wideband sounds. Assume the signal arrives from azimuth and elevation. Estimate the arrival angle, and then plot the correlation function versus lag for one pair of elements.
Load the signal and extract a small portion (5000 samples) for computation.
load gong
y1 = y(1:5000);Set up the receiving array.
N = 5; d = 0.25; mic = phased.OmnidirectionalMicrophoneElement; array = phased.URA([N,N],[d,d],Element=mic);
Simulate the arriving plane wave using the WidebandCollector System object™.
c = 340.0; arrivalAng = [54;5]; coll = phased.WidebandCollector(Sensor=array, ... PropagationSpeed=c, ... SampleRate=Fs, ... ModulatedInput=false); signal = coll(y1,arrivalAng);
Estimate direction of arrival. Choose 10 sensors to correlate with the first element of the URA.
sensorpairs = [[2,4,6,8,10,12,14,16,18,20];ones(1,10)]; estimator = phased.GCCEstimator(SensorArray=array, ... PropagationSpeed=c,SampleRate=Fs, ... SensorPairSource="Property", ... SensorPair=sensorpairs, ... DelayOutputPort=true,CorrelationOutputPort=true); [estimatedAng,taus,R,lags] = estimator(signal);
The estimated angle is:
disp(estimatedAng)
53.7028
4.9552
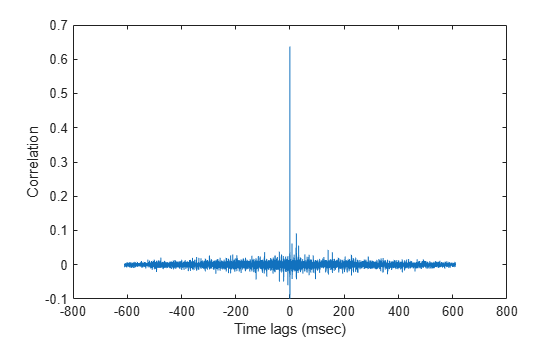
Plot the correlation between sensor 8 and sensor 1. This pair corresponds to the fourth column of the correlation matrix. The estimated value of tau (in msec ) for this pair is:
disp(1000*taus(4))
-0.4757
plot(1000*lags,real(R(:,4))) xlabel("Time lags (msec)") ylabel("Correlation")
Algorithms
References
[1] Charles H. Knapp and Carter, G.C., The Generalized Correlation Method for Estimation of Time Delay, IEEE Transactions on Acoustics, Speech and Signal Processing, Vol, ASSP-24, No. 4. August 1976.
[2] G. Clifford Carter Coherence and Time Delay Estimation, Proceedings of the IEEE, vol 75, No 2, Feb 1987.
Version History
Introduced in R2015b