Path Planning and Following
Path planning, and path following
Plan paths for robots in a given environment using mobileRobotPRM and tune a
pure pursuit controllers to follow a set of waypoints using the controllerPurePursuit
object and Pure Pursuit block in
Simulink®.
Functions
Blocks
| Pure Pursuit | Linear and curvature control commands |
Topics
Path Planning
- Probabilistic Roadmaps (PRM)
How the PRM algorithm works and specific tuning parameters. - Plan Path for a Differential Drive Robot in Simulink
Execute an obstacle-free path between two locations on a given map using probabilistic roadmap planning algorithm in Simulink.
Path Following and Control
- Pure Pursuit Controller
Pure Pursuit Controller functionality and algorithm details. - Path Following for a Differential Drive Robot
Drive a simulated robot along a predetermined path using Pure Pursuit path following controller. - Control Differential Drive Robot in Gazebo with Simulink
Control the Pioneer differential drive robot in Gazebo co-simulation using Simulink.
Featured Examples
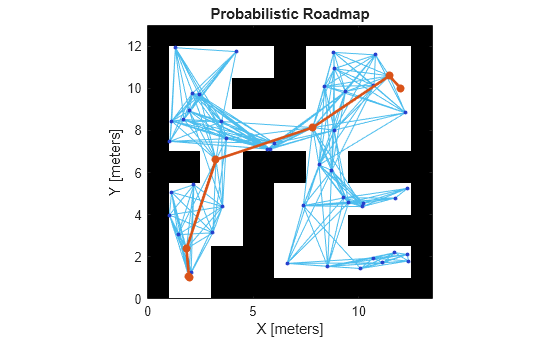
Path Planning in Environments of Different Complexity
Compute an obstacle-free path between two locations on a given map using the Probabilistic Roadmap path planner.

Simulate Path Following on Speedgoat Real-Time Target Machine
Perform real-time simulation of path following on Speedgoat real-time target machine.