Pure Pursuit
Linear and curvature control commands

Libraries:
Robotics System Toolbox /
Mobile Robot Algorithms
Navigation Toolbox /
Control Algorithms
Description
The Pure Pursuit block computes linear velocity and curvature commands for following a path using a set of waypoints and the current pose of a car-like or differential-drive vehicle. The block takes updated poses to update linear velocity and curvature commands for the vehicle to follow a path along a desired set of waypoints. Use the Max curvature and Desired linear velocity parameters to update the curvature and linear velocity, respectively, based on the performance of the vehicle.
The look-ahead distance port and parameter compute a look-ahead point on the path, which is an instantaneous local goal for the vehicle. The curvature command is computed based on this point. Changing the look-ahead distance has a significant impact on the performance of the algorithm. A higher look-ahead distance results in a smoother trajectory for the vehicle, but can cause the vehicle to cut corners along the path. Too low of a look-ahead distance can result in oscillations in tracking the path, causing unstable behavior. For more information on the pure pursuit algorithm, see Pure Pursuit Controller.
Examples
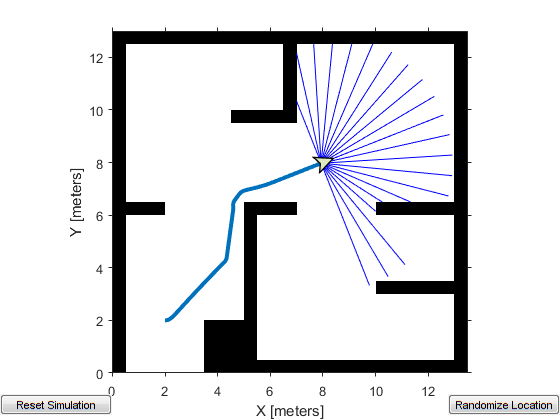
Path Following with Obstacle Avoidance in Simulink
Use Simulink® to avoid obstacles while following a path for a differential drive robot. This example uses ROS to send and receive information from a MATLAB-based simulator. You can replace the simulator with other ROS-based simulators such as Gazebo®.
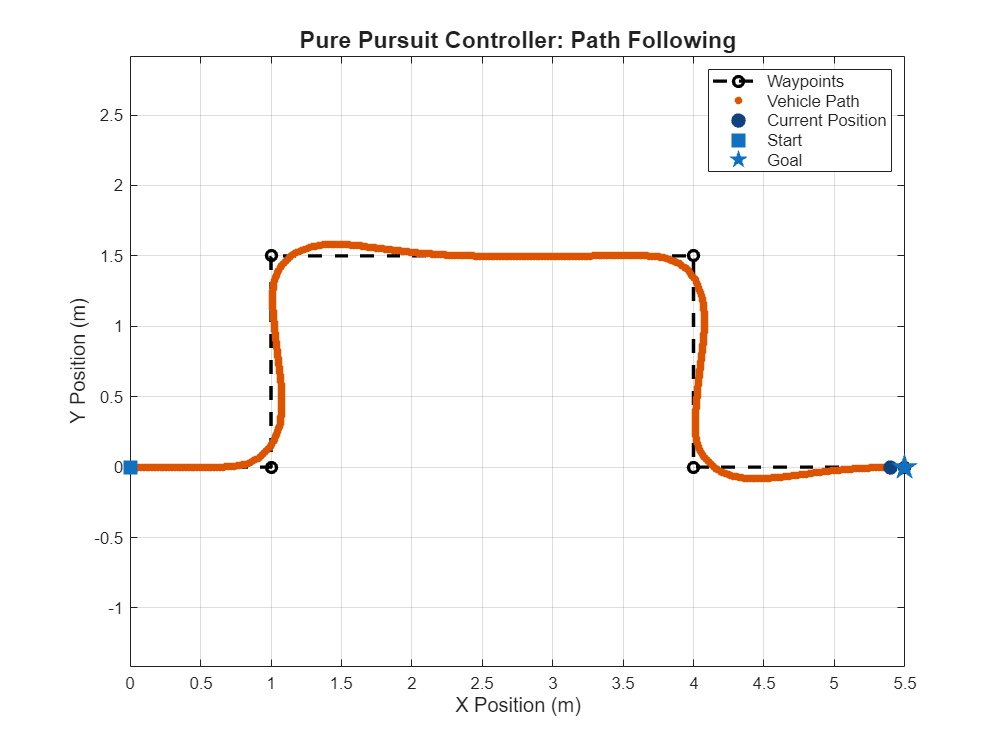
Follow Waypoints in Simulink Using Pure Pursuit Block
Guide a car-like vehicle along a series of waypoints in Simulink using the Pure Pursuit block.