Plan Path for a Bicycle Robot in Simulink
This example demonstrates how to execute an obstacle-free path between two locations on a given map in Simulink®. The path is generated using a probabilistic road map (PRM) planning algorithm (mobileRobotPRM). Control commands for navigating this path are generated using the Pure Pursuit controller block. A bicycle kinematic motion model simulates the robot motion based on those commands.
Load the Map and Simulink Model
Load map in MATLAB workspace
load exampleMaps.matEnter start and goal locations
startLoc = [5 5]; goalLoc = [12 3];
The imported maps are : simpleMap, complexMap and ternaryMap.
Open the Simulink Model
open_system('pathPlanningBicycleSimulinkModel.slx')Model Overview
The model is composed of four primary operations :
Planning
Control
Plant Model
Planning
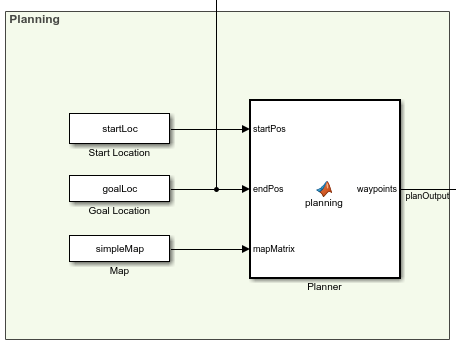
The Planner MATLAB® function block uses the mobileRobotPRM path planner and takes a start location, goal location, and map as inputs. The blocks outputs an array of waypoints that the robot follows. The planned waypoints are used downstream by the Pure Pursuit controller block.
Control
Pure Pursuit
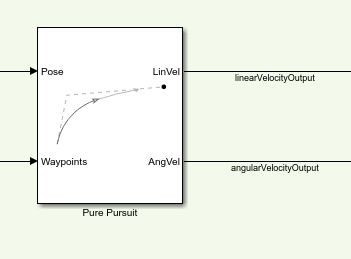
The Pure Pursuit controller block generates the linear velocity and angular velocity commands based on the waypoints and the current pose of the robot.
Check if Goal is Reached
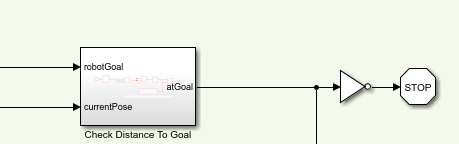
The Check Distance to Goal subsystem calculates the current distance to the goal and if it is within a threshold, the simulation stops.
Plant Model
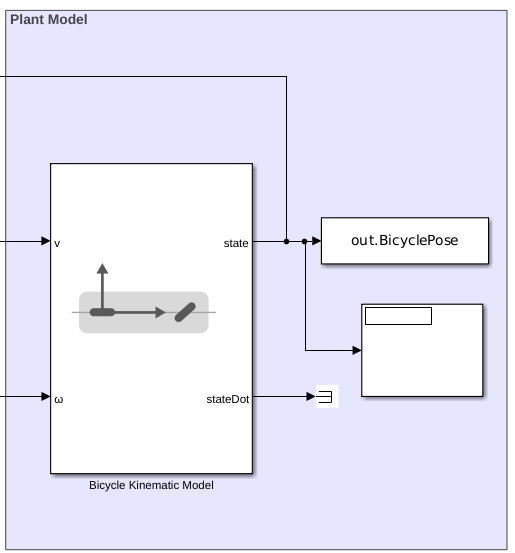
The Bicycle Kinematic Model block creates a vehicle model to simulate simplified vehicle kinematics. The block takes linear and angular velocities as command inputs from the Pure Pursuit controller block, and outputs the current position and velocity states.
Run the Model
To simulate the model
simulation = sim('pathPlanningBicycleSimulinkModel.slx');Visualize The Motion of Robot
To see the poses :
map = binaryOccupancyMap(simpleMap)
map =
binaryOccupancyMap with properties:
LayerName: 'binaryLayer'
DataType: 'logical'
DefaultValue: 0
Resolution: 1
GridSize: [26 27]
GridLocationInWorld: [0 0]
GridOriginInLocal: [0 0]
LocalOriginInWorld: [0 0]
XLocalLimits: [0 27]
YLocalLimits: [0 26]
XWorldLimits: [0 27]
YWorldLimits: [0 26]
robotPose = simulation.BicyclePose
robotPose = 362×3
5.0000 5.0000 0
5.0001 5.0000 -0.0002
5.0007 5.0000 -0.0012
5.0036 5.0000 -0.0062
5.0181 4.9997 -0.0313
5.0902 4.9929 -0.1569
5.4081 4.8311 -0.7849
5.5189 4.6758 -1.1170
5.5366 4.6356 -1.1930
5.5512 4.5942 -1.2684
5.5620 4.5581 -1.2917
5.5722 4.5217 -1.2971
5.5868 4.4697 -1.2984
5.6055 4.4026 -1.2986
5.6311 4.3108 -1.2985
⋮
numRobots = size(robotPose, 2) / 3; thetaIdx = 3; % Translation xyz = robotPose; xyz(:, thetaIdx) = 0; % Rotation in XYZ euler angles theta = robotPose(:,thetaIdx); thetaEuler = zeros(size(robotPose, 1), 3 * size(theta, 2)); thetaEuler(:, end) = theta; for k = 1:size(xyz, 1) show(map) hold on; % Plot Start Location plotTransforms([startLoc, 0], eul2quat([0, 0, 0])) text(startLoc(1), startLoc(2), 2, 'Start'); % Plot Goal Location plotTransforms([goalLoc, 0], eul2quat([0, 0, 0])) text(goalLoc(1), goalLoc(2), 2, 'Goal'); % Plot Robot's XY locations plot(robotPose(:, 1), robotPose(:, 2), '-b') % Plot Robot's pose as it traverses the path quat = eul2quat(thetaEuler(k, :), 'xyz'); plotTransforms(xyz(k,:), quat, 'MeshFilePath',... 'groundvehicle.stl'); pause(0.01) hold off; end
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 16 objects of type patch, line, image, text.](../../examples/robotics/win64/PlanPathForABicycleRobotInSimulinkExample_05.png)
© Copyright 2019-2020 The MathWorks, Inc.