Longitudinal Vehicle Performance Design
Description
You can use the Longitudinal Vehicle Performance Design app to analyze characteristics about the Longitudinal Vehicle block including top speed, maximum acceleration, and maximum road grade at top speed. You can also use the app to determine driving range and the vehicle energy efficiency target for the primary power source. You can use the path of a Longitudinal Vehicle block as the argument when opening the tool to import the block parameters.
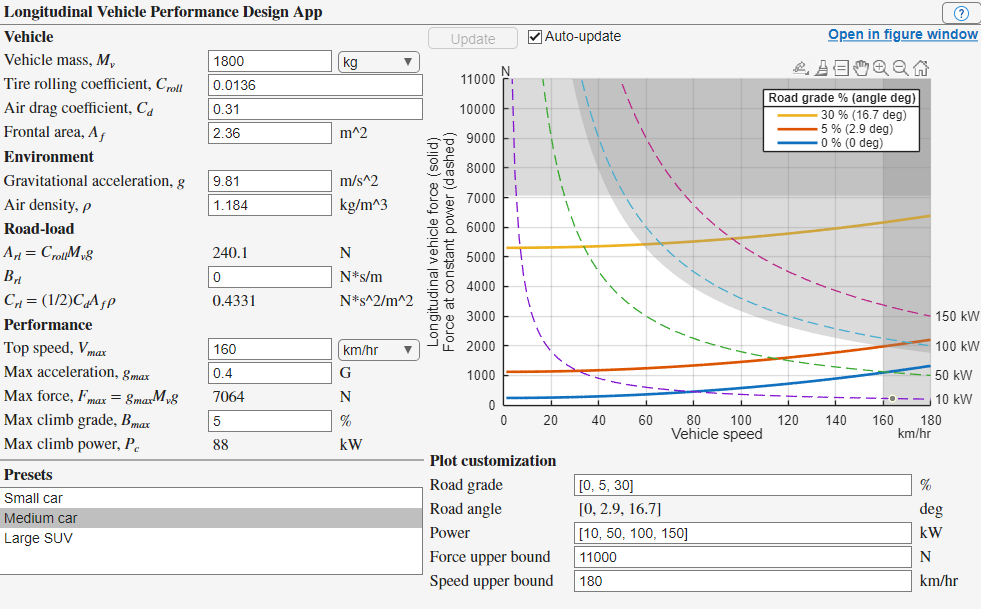
The app takes parameters characterizing the longitudinal vehicle performance and plots vehicle force curves for various road grades. The plot also displays constant power contours that you can define. The shaded regions of the plot indicate vehicle performance constraints:
Top — Maximum vehicle force.
Right-side — Top speed.
Curved — Maximum climbing power.
To populate app data with parameters from a given Longitudinal
Vehicle block, enter the block path as the argument. You can enter field
values as double or simscape.Value objects. To reset the
parameter values in the app to match the block, use the
Reload button. The app considers these parameters
that are available in the block:
Vehicle mass, Mv
Tire rolling coefficient, Croll
Air drag coefficient, Cd
Frontal Area, Af
Brl
You can specify values for gravitational acceleration, g, and air density, ρ, which are fixed values for the block.
You can specify these environmental constraint parameters in the app:
Top speed, Vmax — Determines the vehicle upper speed bound on the horizontal axis. The app indicates this constraint with the right-side shaded region of the plot.
Max acceleration, gmax — Determines the maximum force where, Fmax = gmaxMvg. Fmax must be greater than the force required to drive on the maximum road grade. The app indicates this constraint with the top shaded region of the plot.
Max climb grade, Bmax — Set the maximum climbing grade for the vehicle.
The app derives the value for maximum force as Fmax = gmaxMvg. This value sets the shaded region at the top of the plot.
The longitudinal vehicle force Fveh is a function of the longitudinal vehicle speed, V, and the road angle, θ, such that:
The app calculates the maximum vehicle power, Pmax, as a function of the top speed, Vmax, and the maximum road grade, Bmax, such that:
The app solves for the force needed to reach Pmax, Fveh, such that
You can customize the plot using these parameters:
Road grade — Vector of road grade percentages that plots the force contour for each grade.
Power — Vector of power values in
kWthat plots a constant contour for each power.Force upper bound — Maximum force output for the vehicle. This value should be greater than the force curve to ensure the vehicle has sufficient force for the given road grade. This value is the upper limit of the y-axis.
Speed upper bound — Maximum speed for the vehicle. This value is the upper limit of the x-axis.
Open the Longitudinal Vehicle Performance Design App
To open the app from the MATLAB® command window, enter either:
sdlUtility.LongitudinalVehiclePerformanceDesignApp— Opens the app with the default values.sdlUtility.LongitudinalVehiclePerformanceDesignApp(blockName)— Opens the app with the values defined in the Vehicle Body block,blockName.
Examples
Open a model with a Longitudinal Vehicle block.
openExample('sdl/AbstractCombustionEngineCarExample')Set Parameterization type to
Regular parameter setfor the Longitudinal Vehicle block.set_param('AbstractCombustionEngineCar/Longitudinal Vehicle','vehParamType','sdl.enum.VehicleParameterizationType.Regular')
Launch the app using the path of the Longitudinal Vehicle block as the argument.
sdlUtility.LongitudinalVehiclePerformanceDesignApp('AbstractCombustionEngineCar/Longitudinal Vehicle')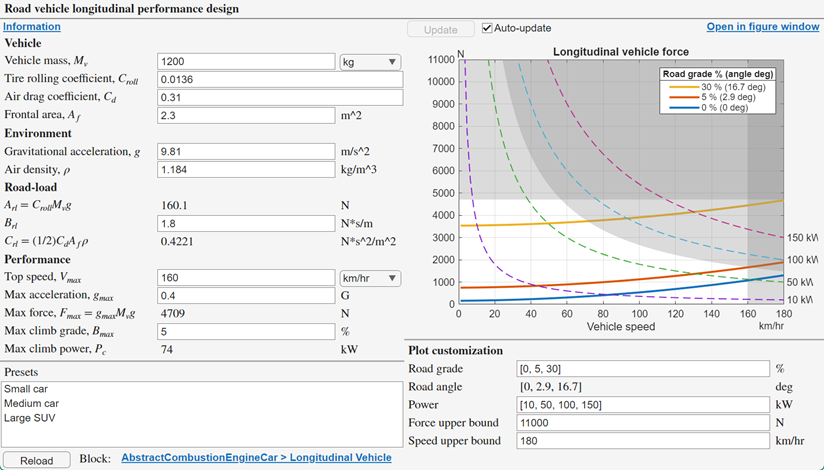
Related Examples
Limitations
The app only supports Longitudinal Vehicle block
parameterizations where Parameterization type is Regular
parameter set. The app ignores parameter values when
Parameterization type is any other setting. You can specify
Small car, Medium car, or Large SUV
as presets in the app from the Presets pane.
Version History
Introduced in R2025a