mdlProjection
Perturb the solver's solution of a system's states to better satisfy time-invariant solution relationships
Required
No
Languages
C, C++
Syntax
#define MDL_PROJECTION
void mdlProjection(SimStruct *S)
Arguments
SSimStruct representing an S-Function block.
Description
This method is intended for use with S-functions that model
dynamic systems whose states satisfy time-invariant relationships,
such as those resulting from mass or energy conservation or other
physical laws. The Simulink® engine invokes this method at each
time step after the model's solver has computed the S-function's states
for that time step. Typically, slight errors in the numerical solution
of the states cause the solutions to fail to satisfy solution invariants
exactly. Your mdlProjection method can compensate
for the errors by perturbing the states so that they more closely
approximate solution invariants at the current time step. As a result,
the numerical solution adheres more closely to the ideal solution
as the simulation progresses, producing a more accurate overall simulation
of the system modeled by your S-function.
Your mdlProjection method's perturbations of system states must fall within
the solution error tolerances specified by the model in which the S-function is embedded.
Otherwise, the perturbations may invalidate the solver's solution. It is up to your
mdlProjection method to ensure that the perturbations meet the error
tolerances specified by the model. See Perturbing a System's States Using a Solution Invariant for a simple method
for perturbing a system's states. The following articles describe more sophisticated
perturbation methods that your mdlProjection method can use.
C.W. Gear. “Maintaining Solution Invariants in the Numerical Solution of ODEs,” Journal on Scientific and Statistical Computing 7, no. 3 (July 1986).
L.F. Shampine. “Conservation Laws and the Numerical Solution of ODEs I.” Computers and Mathematics with Applications 12B (1986): 1287–96.
L.F. Shampine. “Conservation Laws and the Numerical Solution of ODEs II.” Computers and Mathematics with Applications 38 (1999): 61–72.
Examples
Here is a simple, Taylor-series-based approach to perturbing states of a system. Suppose your S-function models a dynamic system that has a solution invariant, , where is a continuous, differentiable function of the system states, , and time, , whose value is constant with time.
Then
where
is the system's ideal state vector at the solver's current time step
is the approximate state vector computed by the solver at the current time step
is the Jacobian of the invariant function evaluated at the point in state space specified by the approximate state vector at the current time step:
is the time at the current time step
is the residual (difference) between the invariant function evaluated at and at the current time step:
Note
The value of is the same at each time step and is known by definition.
Given a continuous, differentiable invariant function for the system that your
S-function models, this formula allows your S-function's
mdlProjection method to compute a perturbation
of the solver's numerical solution, , that more closely matches the ideal solution, , keeping the S-function's solution from drifting from the ideal solution as the simulation progresses.
This example opens up a directory containing the following files required for this example.
mdlProjectionEx1.slxmdlProjectionEx2.slxpredprey_noproj.mpredprey.m
This example illustrates how the perturbation method outlined in the previous section can keep a model's numerical solution from drifting from the ideal solution as a simulation progresses. Consider the following model,mdlProjectionEx1:
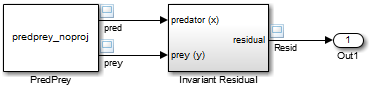
The PredPrey block references an S-function that uses the Lotka-Volterra equations:
to model predator-prey population dynamics, where is the population density of the predators and is the population density of prey. The ideal solution to the predator-prey ODEs satisfies the time-invariant function
where , , and are constants. The S-function assumes a =
1, c = 2, and d = 121.85.
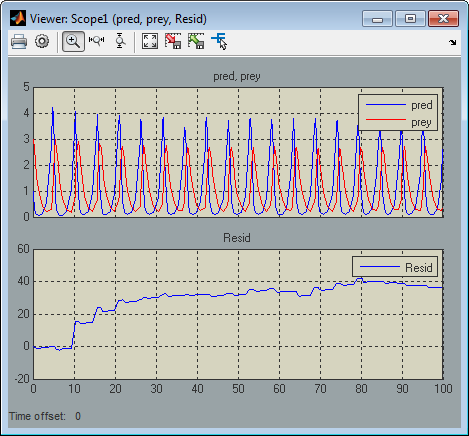
The Invariant Residual block in this model computes the residual between the invariant function evaluated along the system's ideal trajectory through state space and its simulated trajectory:
where and are the values computed by the model's solver for the predator and prey population densities, respectively, at the current time step. Ideally, the residual should be zero throughout simulation of the model, but simulating the model reveals that the residual actually strays considerably from zero:
Now consider the following model, mdlProjectionEx2:
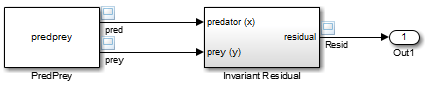
This model is the same as the previous model, except that its S-function,
predprey.m, includes a mdlProjection method
that uses the perturbation approach outlined in Perturbing a System's States Using a Solution Invariant to compensate
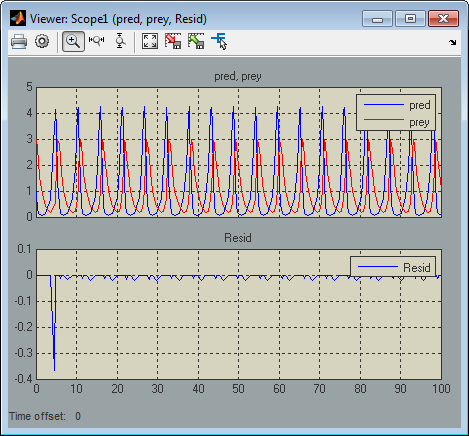
for numerical drift. As a result, the numerical solution more closely tracks the ideal
solution as the simulation progresses as demonstrated by the residual signal, which
remains near or at zero throughout the simulation:
See Also
Version History
Introduced in R2006b