linearizeOptions
Set linearization options
Description
options = linearizeOptions(Name,Value)Name,Value pair
arguments.
Examples
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: 'RateConversionMethod','prewarp' sets
the rate conversion method to the Tustin method with prewarping.
LinearizationAlgorithm — Algorithm used for linearization
'blockbyblock' (default) | 'numericalpert'
Algorithm used for linearization, specified as the comma-separated
pair consisting of 'LinearizationAlgorithm' and
one of the following:
'blockbyblock'— Individually linearize each block in the model, and combine the results to produce the linearization of the specified system.'numericalpert'— Full-model numerical-perturbation linearization in which root-level inports and states are perturbed using forward differences; that is, by adding perturbations to the input and state values. This perturbation method is typically faster than the'numericalpert2'method.'numericalpert2'— Full-model numerical-perturbation linearization in which root-level inports and states are numerically perturbed using central differences; that is, by perturbing the input and state values in both positive and negative directions. This perturbation method is typically more accurate than the'numericalpert'method.
The numerical perturbation linearization methods ignore linear analysis points set in the model and use root-level inports and outports instead.
Block-by-block linearization has several advantages over full-model numerical perturbation:
Many Simulink® blocks have a preprogrammed exact linearization.
You can use linear analysis points to specify a portion of the model to linearize.
You can configure blocks to use custom linearizations without affecting your model simulation.
Structurally nonminimal states are automatically removed.
You can specify linearizations that include uncertainty (requires Robust Control Toolbox™ software).
You can obtain detailed diagnostic information about the linearization.
SampleTime — Sample time of linearization result
-1 (default) | 0 | positive scalar
Sample time of linearization result, specified as the comma-separated
pair consisting of 'SampleTime' and one of the
following:
-1— Set the sample time to the least common multiple of the nonzero sample times in the model.0— Create a continuous-time model.Positive scalar — Specify the sample time for discrete-time systems.
StoreAdvisor — Flag indicating whether to store diagnostic information
false (default) | true
Flag indicating whether to store diagnostic information during linearization, specified as the comma-separated pair consisting of 'StoreAdvisor' and one of the following:
false— Do not store linearization diagnostic information.true— Store linearization diagnostic information.
Linearization commands store and return diagnostic information in a LinearizationAdvisor object. For an example of troubleshooting
linearization results using a LinearizationAdvisor object, see Troubleshoot Linearization Results at Command Line.
BlockReduction — Flag indicating whether to omit blocks that are not on the linearization path
'on' (default) | 'off'
Flag indicating whether to omit blocks that are not in the linearization
path, specified as the comma-separated pair consisting of 'BlockReduction' and
one of the following:
'on'— Return a linearized model that does not include states from noncontributing linearization paths.'off'— Return a linearized model that includes all the states of the model.
Dead linearization paths can include:
Blocks that linearize to zero.
Switch blocks that are not active along the path.
Disabled subsystems.
Signals marked as open-loop linearization points.
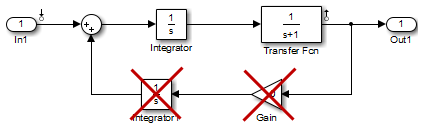
For example, if this flag set to 'on', the
linearization result of the model shown in the following figure includes
only two states. It does not include states from the two blocks outside
the linearization path. These states do not appear because these blocks
are on a dead linearization path with a block that linearizes to zero
(the zero gain block).
This option applies only when LinearizationAlgorithm is
'blockbyblock'.
BlockReduction is always treated as
'on' when
LinearizationAlgorithm is
'numericalpert' or
'numericalpert2'.
IgnoreDiscreteStates — Flag indicating whether to remove discrete-time states
'off' (default) | 'on'
Flag indicating whether to remove discrete-time states from
the linearization, specified as the comma-separated pair consisting
of 'IgnoreDiscreteStates' and one of the following:
'off'— Always include discrete-time states.'on'— Remove discrete states from the linearization. Use this option when performing continuous-time linearization (SampleTime = 0) to accept theDvalue for all blocks with discrete-time states.
This option applies only when LinearizationAlgorithm is 'blockbyblock'.
RateConversionMethod — Rate conversion method
'zoh' (default) | 'tustin' | 'prewarp' | 'upsampling_zoh' | 'upsampling_tustin' | 'upsampling_prewarp'
Method used for rate conversion when linearizing a multirate
system, specified as the comma-separated pair consisting of 'RateConversionMethod' and
one of the following:
'zoh'— Zero-order hold rate conversion method'tustin'— Tustin (bilinear) method'prewarp'— Tustin method with frequency prewarp. When you use this method, set thePreWarpFreqoption to the desired prewarp frequency.'upsampling_zoh'— Upsample discrete states when possible, and use'zoh'otherwise.'upsampling_tustin'— Upsample discrete states when possible, and use'tustin'otherwise.'upsampling_prewarp'— Upsample discrete states when possible, and use'prewarp'otherwise. When you use this method, set thePreWarpFreqoption to the desired prewarp frequency.
For more information on rate conversion and linearization of multirate models, see:
Note
If you use a rate conversion method other than 'zoh',
the converted states no longer have the same physical meaning as the
original states. As a result, the state names in the resulting LTI
system change to '?'.
This option applies only when LinearizationAlgorithm is 'blockbyblock'.
UseExactDelayModel — Flag indicating whether to compute linearization with exact delays
'off' (default) | 'on'
Flag indicating whether to compute linearization with exact
delays, specified as the comma-separated pair consisting of 'UseExactDelayModel' and
one of the following:
'off'— Return a linear model with approximate delays.'on'— Return a linear model with exact delays.
This option applies only when LinearizationAlgorithm is 'blockbyblock'.
NumericalPertRel — Numerical perturbation level
1e-5 (default) | positive scalar
Numerical perturbation level, specified as the comma-separated pair consisting of
'NumericalPertRel' and a positive scalar. This
option applies only when LinearizationAlgorithm is
'numericalpert' or
'numericalpert2'.
The perturbation levels for the system states are:
The perturbation levels for the system inputs are:
You can override these values using the NumericalXPert or NumericalUPert options.
NumericalXPert — State perturbation levels
[] (default) | operating point object
State perturbation levels, specified as the comma-separated pair consisting of
'NumericalXPert' and an operating point object.
This option applies only when
LinearizationAlgorithm is
'numericalpert' or
'numericalpert2'.
To set individual perturbation levels for each state:
Create an operating point object for the model using the
operpointcommand.xPert = operpoint('watertank');Set the state values in the operating point object to the perturbation levels.
xPert.States(1).x = 2e-3; xPert.States(2).x = 3e-3;
Set the value of the
NumericalXPertoption to the operating point object.opt = linearizeOptions('LinearizationAlgorithm','numericalpert'); opt.NumericalXPert = xPert;
If NumericalXPert is empty, [],
the linearization algorithm derives the state perturbation levels
using NumericalPertRel.
NumericalUPert — Input perturbation levels
[] (default) | operating point object
Input perturbation levels, specified as the comma-separated pair consisting of
'NumericalUPert' and an operating point object.
This option applies only when
LinearizationAlgorithm is
'numericalpert' or
'numericalpert2'.
To set individual perturbation levels for each input:
Create an operating point object for the model using the
operpointcommand.uPert = operpoint('watertank');Set the input values in the operating point object to the perturbation levels.
uPert.Inputs(1).x = 3e-3;
Set the value of the
NumericalUPertoption to the operating point object.opt = linearizeOptions('LinearizationAlgorithm','numericalpert'); opt.NumericalUPert = uPert;
If NumericalUPert is empty, [],
the linearization algorithm derives the input perturbation levels
using NumericalPertRel.
Output Arguments
Version History
Introduced in R2013b
See Also
linearize | slLinearizer | ulinearize (Robust Control Toolbox) | linlft
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)