EtherCAT Init
Initialize EtherCAT main device node with data in the EtherCAT Network Information (ENI) file
Libraries:
Simulink Real-Time /
EtherCAT
Description
The EtherCAT Init block initializes the EtherCAT® main device stack. The block specifies the Ethernet interface cards in the network.
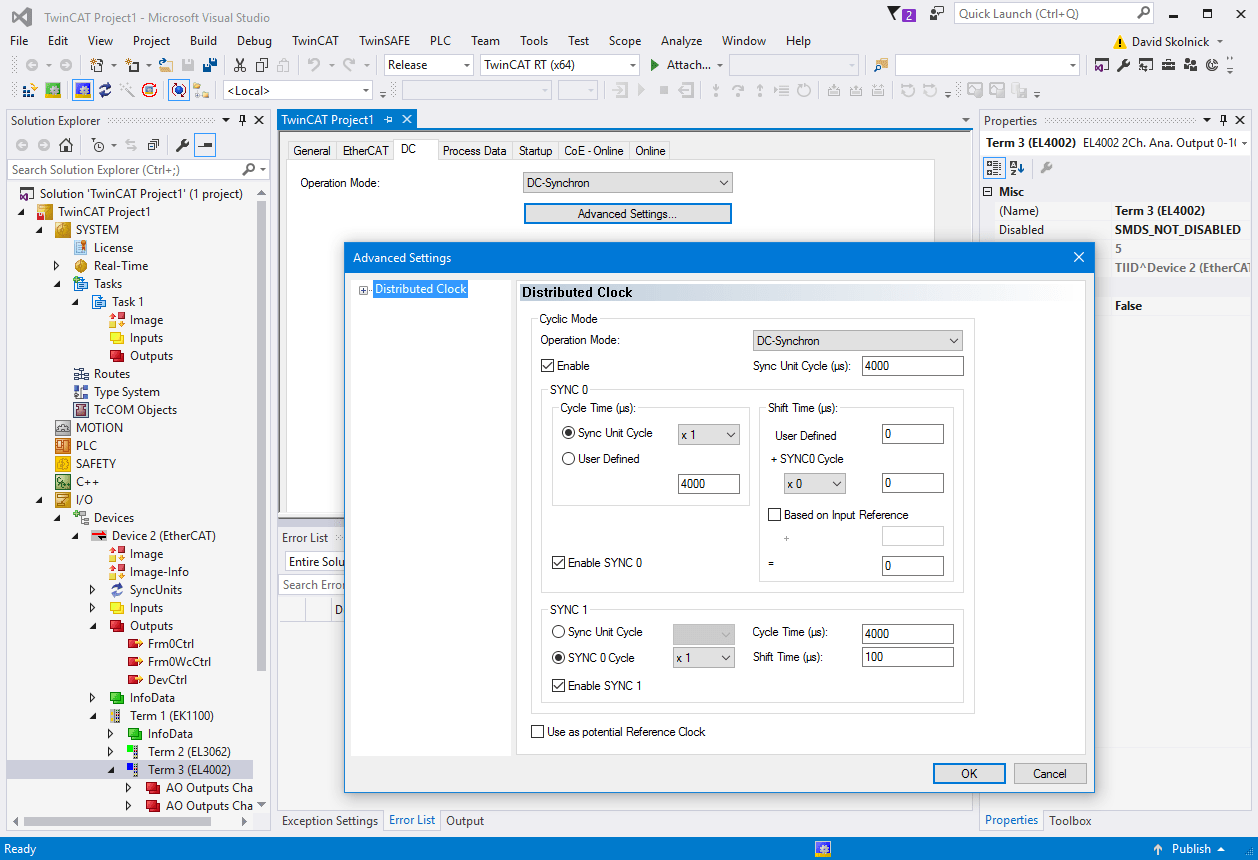
Before you use this block, create and save an EtherCAT Network Information (ENI) file. You export the ENI file from the Beckhoff® TwinCAT® or the acontis EC-Engineer. See Configure EtherCAT Network by Using TwinCAT 3.
To find the ENI file, click Browse. To read the ENI file and store the data in the EtherCAT Init block, click Refresh Data.
The Simulink® Real-Time™ software supports multiple EtherCAT networks. To use multiple networks:
Use a different Ethernet card interface for each EtherCAT network.
In the model, use one EtherCAT Init block for each network.
To include EtherCAT distributed clocks when PTP is enabled for the model, use EtherCAT bus shift mode.
Examples
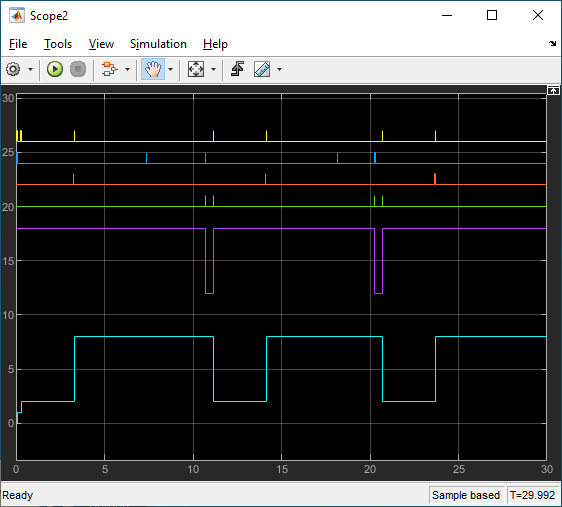
EtherCAT Protocol with Beckhoff Analog IO Subordinate Devices EL3062 and EL4002
Communicate with EtherCAT devices using the Beckhoff® analog I/O terminals EL3062 and EL4002.
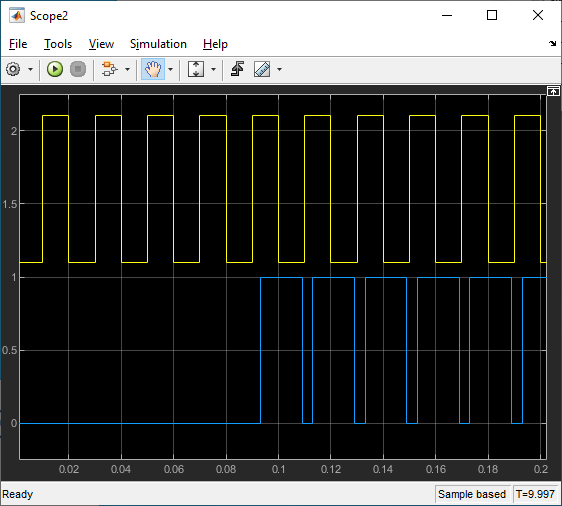
EtherCAT Protocol with Beckhoff Digital IO Subordinate Devices EL1004 and EL2004
Communicate with EtherCAT devices using the Beckhoff digital I/O terminals EL1004 and EL2004.
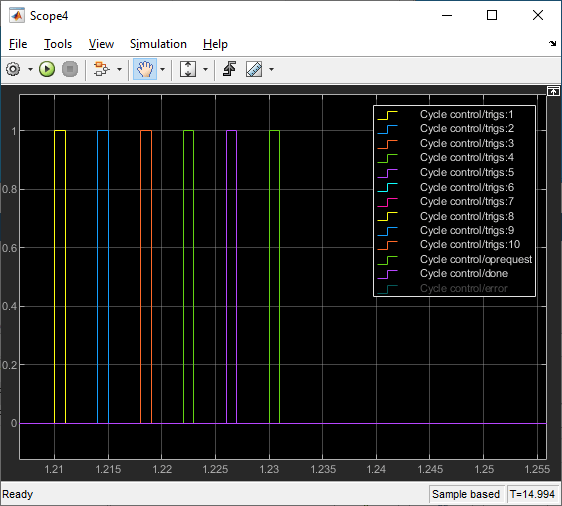
EtherCAT Protocol Sequenced Writing SoE Subordinate Device Configuration Variables
Use SoE blocks and a simple state machine to write configuration values to variables that can only be written before going to EtherCAT Op state.
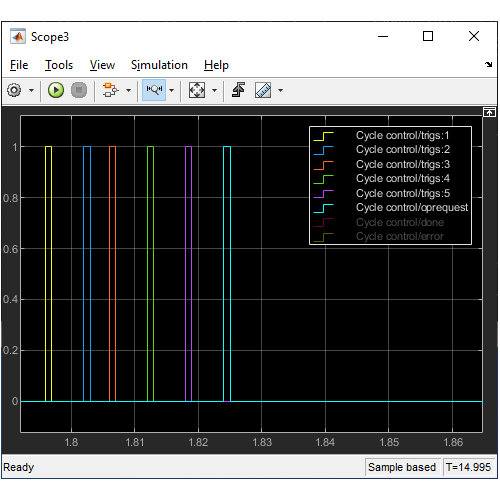
EtherCAT Protocol Sequenced Writing CoE Subordinate Device Configuration Variables
Use CoE blocks and a simple state machine to write configuration values to variables that can only be written before going to EtherCAT Op state.
EtherCAT Protocol Detect Network Failure and Reset
Use the EtherCAT Notifications block to detect a failure in the connected network and to restart the network when the failure is corrected.
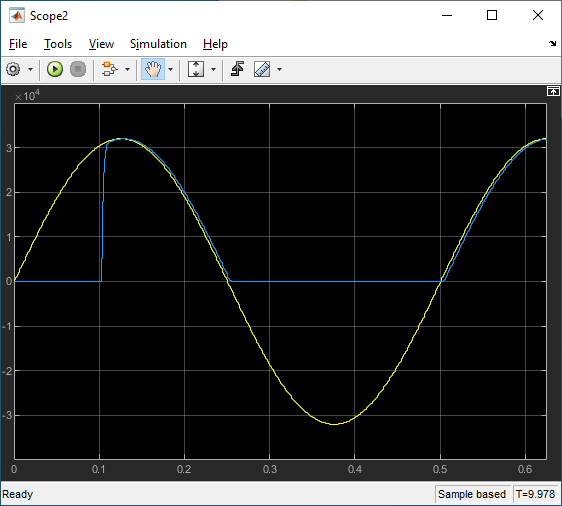
EtherCAT Protocol Motor Velocity Control with Accelnet Drive
Control the velocity of a motor by using EtherCAT communication.
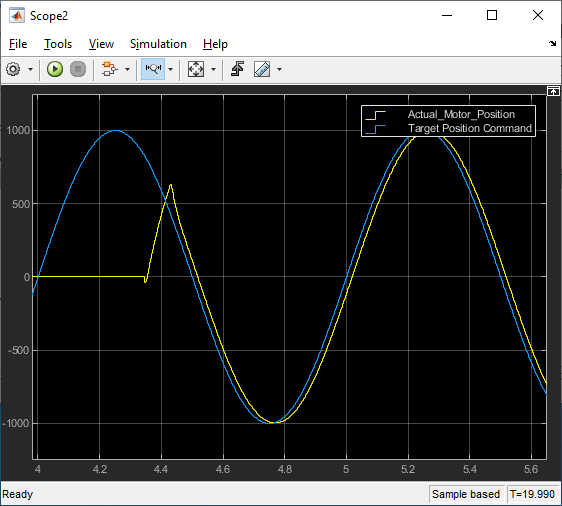
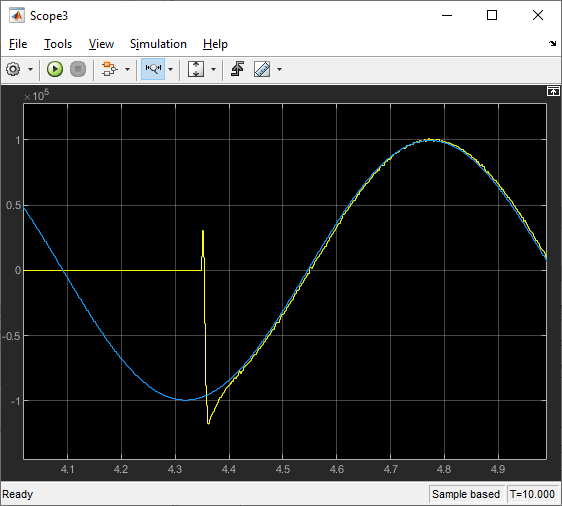
EtherCAT Protocol Motor Position Control with Accelnet Drive
Control the position of a motor by using EtherCAT communication.
Generate ENI Files for EtherCAT Devices
Generate EtherCAT network information (ENI) files to use in Simulink® Real-Time™ with EtherCAT devices.
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020b