DC-DC Voltage Controller
Discrete-time DC-DC voltage PI control with feedforward and optional integral anti-windup
Libraries:
Simscape /
Electrical /
Control /
General Machine Control
Description
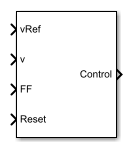
The DC-DC Voltage Controller block implements discrete-time proportional-integral (PI) DC-DC voltage control with feedforward, FF. The feedforward input optimizes the transient response. The block can output a duty cycle or a current control signal. To avoid saturation of the integral gain, the block can implement anti-windup gain.
Equations
The equation that the DC-DC Voltage Controller block uses to calculate the control signal is
where:
control is the control signal, expressed as a duty cycle or a current.
Kp is the proportional gain.
Ki is the integral gain.
Ts is the sample time.
vref is the reference voltage.
v is the measured voltage.
FF is the feedforward input.
To avoid saturation of the integrator output, the block uses an anti-windup mechanism. The integrator gain is then equal to
where:
Kaw is the anti-windup gain.
controlsat is the saturated control signal, which the block calculates as
where:
controlunsat is the unsaturated control signal.
controlmin is the lower limit for the control signal.
controlmax is the upper limit for the control signal.
Examples
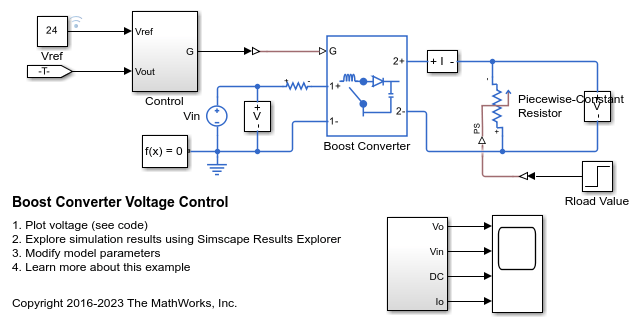
Boost Converter Voltage Control
Control the output voltage of a boost converter. To adjust the duty cycle, the Control subsystem uses a PI-based control algorithm. The input voltage is considered constant throughout the simulation. A variable resistor provides the load for the system. The total simulation time (t) is 0.25 seconds. At t = 0.15 seconds, the load changes.
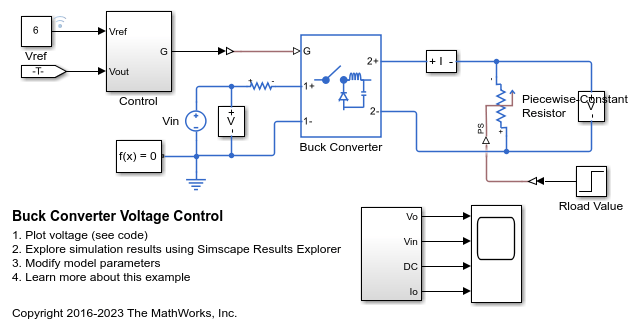
Buck Converter Voltage Control
Control the output voltage of a buck converter. To adjust the duty cycle, the Control subsystem uses a PI-based control algorithm. The input voltage is considered constant throughout the simulation. A variable resistor provides the load for the system. The total simulation time (t) is 0.25 seconds. At t = 0.15 seconds, the load changes.

Four-Switch Buck-Boost Converter Control
Control the output voltage of a four-switch buck-boost converter. To adjust the duty cycle, the Control subsystem uses a PI-based control algorithm. In both the boost and buck modes, one switch controls the duty cycle, one is operated inversely and the other two are kept in fix positions. The input voltage and the system load are considered constant throughout the simulation. The total simulation time (t) is 0.25 seconds. At t = 0.15 seconds, the voltage reference changes and the system switches from buck mode to boost mode.
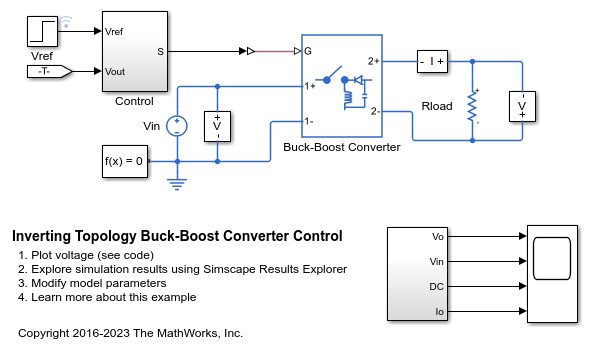
Inverting Topology Buck-Boost Converter Control
Control the output voltage of an inverting topology buck-boost converter. The inverting topology buck-boost converter uses only a single switch and the output voltage is of the opposite polarity than the input. To adjust the duty cycle, the Control subsystem uses a PI-based control algorithm. The input voltage and the system load are considered constant throughout the simulation. The total simulation time (t) is 0.25 seconds. At t = 0.15 seconds, the voltage reference changes and the system switches from buck mode to boost mode.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2018a