C28x CAN Receive
Enhanced Controller Area Network receive mailbox
Libraries:
C2000 Microcontroller Blockset /
C2803x
C2000 Microcontroller Blockset /
C2805x
C2000 Microcontroller Blockset /
C2806x
C2000 Microcontroller Blockset /
C280x
C2000 Microcontroller Blockset /
C281x
C2000 Microcontroller Blockset /
C2833x
C2000 Microcontroller Blockset /
C2834x
C2000 Microcontroller Blockset /
F280013x
C2000 Microcontroller Blockset /
F280015x
C2000 Microcontroller Blockset /
F28002x
C2000 Microcontroller Blockset /
F28003x
C2000 Microcontroller Blockset /
F28004x
C2000 Microcontroller Blockset /
F2807x
C2000 Microcontroller Blockset /
F2837xD
C2000 Microcontroller Blockset /
F2837xS
C2000 Microcontroller Blockset /
F2838x /
C28x
C2000 Microcontroller Blockset /
F28p65x
Description
The CAN Receive block generates source code for receiving enhanced Controller Area Network (CAN) messages through an CAN mailbox. CAN modules on the processor provide serial communication capability and have 32 mailboxes configurable for receive or transmit. The block supports CAN data frames in standard or extended format.
The block supports CAN or DCAN depending upon the type of C2000 processors.
To use the CAN Receive block with the CAN Pack block in
the canmsglib library, set Data type to
CAN_MESSAGE_TYPE.
Configure the CAN modules for a specific hardware board by navigating to Hardware Implementation > Target hardware resources. Verify that these settings meet the requirements of your application.
Examples
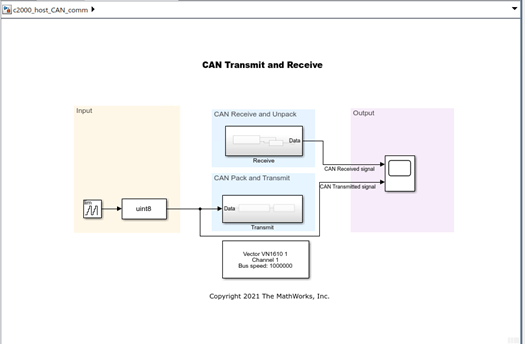
Communication Using CAN Blocks
Use the CAN blocks to set up CAN communication between the target hardware and your host computer for Texas Instruments™ C2000™ Microcontroller Blockset.
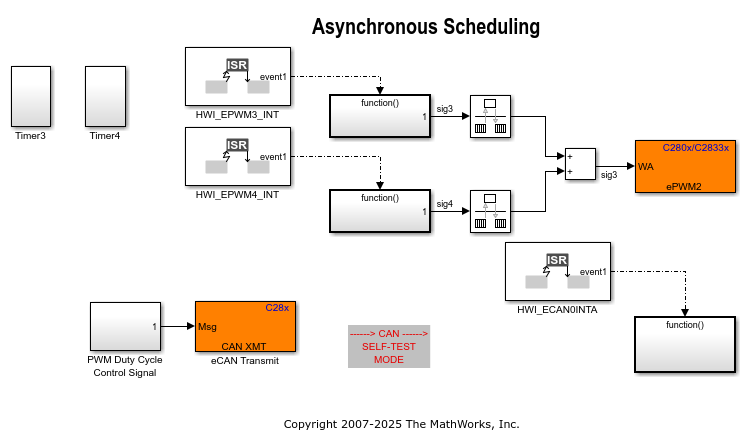
Asynchronous Scheduling
Use the Texas Instruments™ C28x™ peripherals and Hardware Interrupt blocks to control the real-time execution of Simulink® function-call subsystems in an asynchronous fashion.