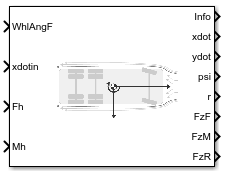
Vehicle Body 3DOF Three Axles
Three-axle vehicle body with longitudinal, lateral, and yaw motion
Libraries:
Vehicle Dynamics Blockset /
Vehicle Body
Description
The Vehicle Body 3DOF Three Axles block implements a rigid, three-axle vehicle body model to calculate longitudinal, lateral, and yaw motion. The block accounts for the axle and hitch reaction forces due to the vehicle body mass acceleration, aerodynamic drag, and steering.
This block uses the Vehicle Dynamics Blockset™ Vehicle Coordinate System. The vehicle coordinate system axes (XV, YV, ZV) are fixed in a reference frame attached to the vehicle. The coordinate system conforms to SAE J670 standard with X-forward, Y-right, Z-down orientation with origin at the center of gravity of the sprung mass. Sign convention for steer angle is positive right.
Use this block in vehicle dynamics and automated driving studies to model nonholonomic vehicle motion when vehicle pitch, roll, and vertical motion are not significant.
Use the Vehicle track parameter to specify the number of wheels.
| Vehicle Track Setting | Implementation |
|---|---|
|
|
| Forces act at the axle hard-point locations. |
Use the Axle forces parameter to specify the type of force.
| Axle Forces Setting | Implementation |
|---|---|
|
|
|
|
|
|
To create additional input ports, under Input signals, select these block parameters.
Input Signals Pane Parameter | Input Port | Description |
|---|---|---|
Front wheel steering |
| Front wheel angle, δF |
| Middle wheel steering | WhlAngM | Middle wheel angle, δM |
| Rear wheel steering | WhlAngR | Rear wheel angle, δR |
External wind |
| Wind speed, WX, WY, and WZ, in an inertial reference frame |
| External friction | Mu | Friction coefficient |
| External forces | FExt | External force on the vehicle center of gravity (CG), Fx, Fy, and Fz, in the vehicle-fixed frame |
| External moments |
| External moment about the vehicle CG, Mx, My, and Mz, in the vehicle-fixed frame |
| Rear hitch forces | FhR | Hitch force applied to the body at the rear hitch location, FhRx, FhRy, and FhRz, in the vehicle-fixed frame |
| Rear hitch moments | MhR | Hitch moment at the rear hitch location, MhRx, MhRy, and MhRz, about the vehicle-fixed frame |
Initial longitudinal position |
| Initial vehicle CG displacement along the earth-fixed X-axis |
Initial yaw angle |
| Initial rotation of the vehicle-fixed frame about the earth-fixed Z-axis (yaw) |
Initial longitudinal velocity |
| Initial vehicle CG velocity along the vehicle-fixed x-axis |
Initial yaw rate |
| Initial vehicle angular velocity about the vehicle-fixed z-axis (yaw rate) |
Initial lateral position |
| Initial vehicle CG displacement along the earth-fixed Y-axis |
Air temperature | AirTemp | Ambient air temperature. Consider this option if you want to vary the temperature during run time. |
Initial lateral velocity |
| Initial vehicle CG velocity along the vehicle-fixed y-axis |
Equations of Motion
To determine the vehicle motion, the block solves the rigid body planar dynamics equations of motion.
Single Track
| Calculation | Description |
|---|---|
Dynamics | The block solves the rigid-body planar dynamics equations to determine the vehicle longitudinal motion. If you set Axle
forces to either If you set Axle
forces to |
External forces | External forces include both drag and external force inputs. The forces act on the vehicle CG. If you set Axle
forces to If you set Axle
forces to The block divides the normal forces by the nominal normal load to vary the effective friction parameters during weight and load transfer. The block maintains pitch and roll equilibrium. |
Tire forces | The block uses the ratio of the local, longitudinal, and lateral velocities to determine the slip angles. The block uses the steering angles to transform the tire forces to the vehicle-fixed frame. If you set Axle
forces to |
Dual Track
| Calculation | Description |
|---|---|
Dynamics | The block solves the rigid-body planar dynamics equations to determine the vehicle longitudinal motion. If you set Axle
forces to |
External forces | External forces include both drag and external force inputs. The forces act on the vehicle CG. If you set Axle
forces to If you set Axle
forces to The block divides the normal forces by the nominal normal load to vary the effective friction parameters during weight and load transfer. The block maintains pitch and roll equilibrium. |
Tire forces | The block uses the ratio of the local, longitudinal, and lateral velocities to determine the slip angles. The block uses the steering angles to transform the tire forces to the vehicle-fixed frame. If you set Axle
forces to |
The illustrations use these variables.
| a, b, c | Longitudinal distance of the front, middle, and rear axles, respectively, from the normal projection point of the vehicle CG onto the common axle plane |
| h | Height of vehicle CG above the axle plane along the vehicle-fixed z-axis |
| d | Lateral distance from geometric centerline to center of mass along the vehicle-fixed y-axis |
| hh | Height of the hitch above the axle plane along the vehicle-fixed z-axis |
| dh | Longitudinal distance of the hitch from normal projection point of the vehicle CG onto the common axle plane |
| hl | Lateral distance from center of mass to hitch along the vehicle-fixed y-axis. |
| wf, wm, wr | Front, middle, and rear track width, respectively |
This table summarizes the block implementation for the drag calculation.
| Calculation | Description |
|---|---|
Coordinate transformation | The block transforms the wind speeds from the inertial frame to the vehicle-fixed frame. |
Drag forces | To determine a relative airspeed, the block subtracts the wind speed from the CG vehicle velocity. Using the relative airspeed, the block determines the drag forces. |
Drag moments | Using the relative airspeed, the block determines the drag moments. |
To enable the mapped corner stiffness and relaxation length dynamic
parameters, set Axle forces to External
longitudinal force or External longitudinal
velocity.
| Parameter Settings | Description | |
|---|---|---|
| Mapped Corner Stiffness | Include Relaxation Length Dynamics | |
|
| The block uses constant corner stiffness values for Cyf, Cym, and Cyr. The slip angles include the relaxation length dynamic settings. The relaxation length approximates an effective corner stiffness force that is a function of wheel travel. |
|
| The block uses lookup tables that are functions of the corner stiffness data and slip angles. The slip angles include the relaxation length dynamic settings. The relaxation length approximates an effective corner stiffness force that is a function of wheel travel. |
|
| The block uses constant corner stiffness values Cyf, Cym and Cyr. |
The equations use these variables.
| Vehicle CG displacement, velocity, and acceleration, along the vehicle-fixed x-axis | |
| Vehicle CG displacement, velocity, and acceleration, along the vehicle-fixed y-axis | |
ψ | Rotation of the vehicle-fixed frame about the earth-fixed Z-axis (yaw) |
r, | Vehicle angular velocity, about the vehicle-fixed z-axis (yaw rate) |
| Fxf, Fxm, Fxr | Longitudinal forces applied to front, middle, and rear wheels, along the vehicle-fixed x-axis |
| Fyf, Fym, Fyr | Lateral forces applied to front, middle, and rear wheels, along vehicle-fixed y-axis |
| Fxext, Fyext, Fzext | External forces applied to vehicle CG, along the vehicle-fixed x-, y-, and z-axes |
| Fdx, Fdy, Fdz | Drag forces applied to vehicle CG, along the vehicle-fixed x-, y-, and z-axes |
| Fxinput, Fyinput, Fzinput | Input forces applied to vehicle CG, along the vehicle-fixed x-, y-, and z-axes |
| Mxext, Myext, Mzext | External moment about vehicle CG, about the vehicle-fixed x-, y-, and z-axes |
| Mdx, Mdy, Mdz | Drag moment about vehicle CG, about the vehicle-fixed x-, y-, and z-axes |
| Mxinput, Myinput, Mzinput | Input moment about vehicle CG, about the vehicle-fixed x-, y-, and z-axes |
| Izz | Vehicle body moment of inertia about the vehicle-fixed z-axis |
| Fxft, Fxmt, Fxrt | Longitudinal tire force applied to front, middle, and rear wheels, along the vehicle-fixed x-axis |
| Fyft, Fymt, Fyrt | Lateral tire force applied to front, middle, and rear wheels, along vehicle-fixed y-axis |
| Fxfl, Fxfr | Longitudinal force applied to front left and front right wheels, along the vehicle-fixed x-axis |
| Fyfl, Fyfr | Lateral force applied to front left and front right wheels, along the vehicle-fixed y-axis |
| Fxrl, Fxrr | Longitudinal force applied to rear left and rear right wheels, along the vehicle-fixed x-axis |
| Fyrl, Fyrr | Lateral force applied to rear left and rear right wheels, along the vehicle-fixed y-axis |
| Fxflt, Fxfrt | Longitudinal tire force applied to front left and front right wheels, along the vehicle-fixed x-axis |
| Fxmlt, Fxmrt | Longitudinal tire force applied to middle left and middle right wheels, along the vehicle-fixed x-axis |
| Fxrlt, Fxrrt | Longitudinal tire force applied to rear left and rear right wheels, along the vehicle-fixed x-axis |
| Fyflt, Fyfrt | Lateral force tire applied to front left and front right wheels, along the vehicle-fixed y-axis |
| Fymlt, Fymrt | Lateral force tire applied to middle left and middle right wheels, along the vehicle-fixed y-axis |
| Fyrlt, Fyrrt | Lateral force applied to rear left and rear right wheels, along the vehicle-fixed y-axis |
| Fzf,Fzr | Normal force applied to front and rear wheels, along vehicle-fixed z-axis |
| Fznom | Nominal normal force applied to axles, along the vehicle-fixed z-axis |
| Fzfl,Fzfr | Normal force applied to front left and right wheels, along vehicle-fixed z-axis |
| Fzrl,Fzrr | Normal force applied to rear left and right wheels, along vehicle-fixed z-axis |
| m | Vehicle body mass |
| a, b | Distance of front and rear wheels, respectively, from the normal projection point of vehicle CG onto the common axle plane |
| h | Height of vehicle CG above the axle plane |
| d | Lateral distance from the geometric centerline to the center of mass along the vehicle-fixed y-axis |
| hh | Height of the hitch above the axle plane along the vehicle-fixed z-axis |
| dh | Longitudinal distance of the hitch from the normal projection point of tractor CG onto the common axle plane |
| hl | Lateral distance from center of mass to hitch along the vehicle-fixed y-axis. |
| αf, αr | Front and rear wheel slip angles |
| αfl, αfr | Front left and right wheel slip angles |
| αrl, αrr | Rear left and right wheel slip angles |
| δf, δr | Front and rear wheel steering angles |
| δrl, δrr | Rear left and right wheel steering angles |
| δfl, δfr | Front left and right wheel steering angles |
| wf, wr | Front and rear track widths |
| Cyf, Cyr | Front and rear wheel cornering stiffness |
| Cyfdata, Cyrdata | Front and rear wheel cornering stiffness data |
| σf, σr | Front and rear wheel relaxation length |
| αfσ, αrσ | Front and rear wheel slip angles that include relaxation length |
| vwf, vwr | Magnitude of front and rear wheel hardpoint velocity |
| μf, μr | Front and rear wheel friction coefficient |
| μfl, μfr | Front left and right wheel friction coefficient |
| μrl, μrr | Rear left and right wheel friction coefficient |
| Cd | Air drag coefficient acting along vehicle-fixed x-axis |
| Cs | Air drag coefficient acting along vehicle-fixed y-axis |
| Cl | Air drag coefficient acting along vehicle-fixed z-axis |
| Crm | Air drag roll moment acting about the vehicle-fixed x-axis |
| Cpm | Air drag pitch moment acting about the vehicle-fixed y-axis |
| Cym | Air drag yaw moment acting about the vehicle-fixed z-axis |
| Af | Frontal area |
| R | Atmospheric specific gas constant |
| T | Environmental air temperature |
| Pabs | Environmental absolute pressure |
| wx, wy, wz | Wind speed, along the vehicle-fixed x-, y-, and z-axes |
| Wx, Wy, Wz | Wind speed, along inertial X-, Y-, and Z-axes |
Examples
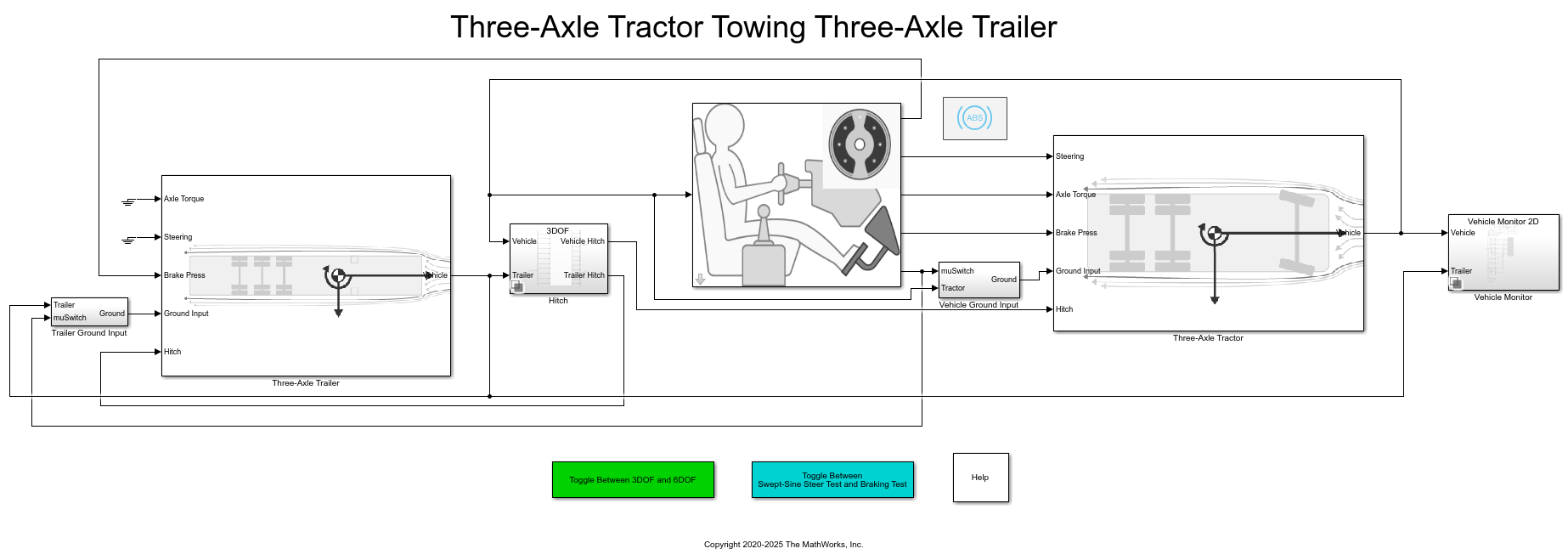
Three-Axle Tractor Towing a Three-Axle Trailer
Simulates three-axle tractor towing a three-axle trailer for commercial trucking applications. Implements hitch subsystem, sinusoidal wave steering or braking test, and axle torque applied to tractor rear wheels.
Ports
Input
Output
Parameters
References
[1] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
Extended Capabilities
Version History
Introduced in R2020a