Use Relative and Absolute Timestamps in CAN Communication
This example shows you how to use the InitialTimestamp property of a CAN channel to work with relative and absolute timestamps for CAN messages. It uses MathWorks® virtual CAN channels connected in a loopback configuration. This example describes the workflow for a CAN network, but the concept demonstrated also applies to a CAN FD network.
Open the DBC File
Open the DBC file to access the database definitions.
db = canDatabase("VehicleInfo.dbc")db =
Database with properties:
Name: 'VehicleInfo'
Path: '/tmp/Bdoc26a_3233028_2250929/tp5f6ebb1e/vnt-ex13648766/VehicleInfo.dbc'
UTF8_File: '/tmp/Bdoc26a_3233028_2250929/tp5f6ebb1e/vnt-ex13648766/VehicleInfo.dbc'
Nodes: {}
NodeInfo: [0×0 struct]
Messages: {'WheelSpeeds'}
MessageInfo: [1×1 struct]
Attributes: {'BusType'}
AttributeInfo: [1×1 struct]
UserData: []
Create the CAN Channels
Create CAN channels on which you can transmit and receive messages.
txCh = canChannel("MathWorks", "Virtual 1", 1)
txCh =
Channel with properties:
Device Information
DeviceVendor: 'MathWorks'
Device: 'Virtual 1'
DeviceChannelIndex: 1
DeviceSerialNumber: 0
ProtocolMode: 'CAN'
Status Information
Running: 0
MessagesAvailable: 0
MessagesReceived: 0
MessagesTransmitted: 0
InitializationAccess: 1
InitialTimestamp: [0×0 datetime]
FilterHistory: 'Standard ID Filter: Allow All | Extended ID Filter: Allow All'
Channel Information
BusStatus: 'N/A'
SilentMode: 0
TransceiverName: 'N/A'
TransceiverState: 'N/A'
ReceiveErrorCount: 0
TransmitErrorCount: 0
BusSpeed: 500000
SJW: []
TSEG1: []
TSEG2: []
NumOfSamples: []
Other Information
Database: []
UserData: []
rxCh = canChannel("MathWorks", "Virtual 1", 2)
rxCh =
Channel with properties:
Device Information
DeviceVendor: 'MathWorks'
Device: 'Virtual 1'
DeviceChannelIndex: 2
DeviceSerialNumber: 0
ProtocolMode: 'CAN'
Status Information
Running: 0
MessagesAvailable: 0
MessagesReceived: 0
MessagesTransmitted: 0
InitializationAccess: 1
InitialTimestamp: [0×0 datetime]
FilterHistory: 'Standard ID Filter: Allow All | Extended ID Filter: Allow All'
Channel Information
BusStatus: 'N/A'
SilentMode: 0
TransceiverName: 'N/A'
TransceiverState: 'N/A'
ReceiveErrorCount: 0
TransmitErrorCount: 0
BusSpeed: 500000
SJW: []
TSEG1: []
TSEG2: []
NumOfSamples: []
Other Information
Database: []
UserData: []
Attach the database directly to the receiving channel to apply database definitions to incoming messages automatically.
rxCh.Database = db;
Create the CAN Message
Create a new CAN message by specifying the database and the message name WheelSpeeds to have the database definition applied.
msg = canMessage(db, "WheelSpeeds")msg =
Message with properties:
Message Identification
ProtocolMode: 'CAN'
ID: 1200
Extended: 0
Name: 'WheelSpeeds'
Data Details
Timestamp: 0
Data: [0 0 0 0 0 0 0 0]
Signals: [1×1 struct]
Length: 8
Protocol Flags
Error: 0
Remote: 0
Other Information
Database: [1×1 can.Database]
UserData: []
Start the CAN Channels
Start the channels to begin using them for transmission and reception.
start(rxCh) start(txCh)
Transmit CAN Messages
The transmit function sends messages onto the network. Use pause to add delays between the transmit operations. Update the LF_WSpeed signal value before each transmission.
msg.Signals.LF_WSpeed = 10; transmit(txCh, msg) pause(1); msg.Signals.LF_WSpeed = 20; transmit(txCh, msg) pause(2); msg.Signals.LF_WSpeed = 30; transmit(txCh, msg) pause(3); msg.Signals.LF_WSpeed = 40; transmit(txCh, msg) pause(1); msg.Signals.LF_WSpeed = 50; transmit(txCh, msg)
Receive the CAN Messages
The receive function receives CAN messages that occurred on the network.
stop(rxCh) stop(txCh) msgRx = receive(rxCh, Inf, "OutputFormat", "timetable")
msgRx=5×8 timetable
Time ID Extended Name Data Length Signals Error Remote
___________ ____ ________ _______________ ______________________ ______ ____________ _____ ______
0.01929 sec 1200 false {'WheelSpeeds'} {[42 248 0 0 0 0 0 0]} 8 {1×1 struct} false false
1.0376 sec 1200 false {'WheelSpeeds'} {[46 224 0 0 0 0 0 0]} 8 {1×1 struct} false false
3.0512 sec 1200 false {'WheelSpeeds'} {[50 200 0 0 0 0 0 0]} 8 {1×1 struct} false false
6.0751 sec 1200 false {'WheelSpeeds'} {[54 176 0 0 0 0 0 0]} 8 {1×1 struct} false false
7.0988 sec 1200 false {'WheelSpeeds'} {[58 152 0 0 0 0 0 0]} 8 {1×1 struct} false false
Inspect Signal Data
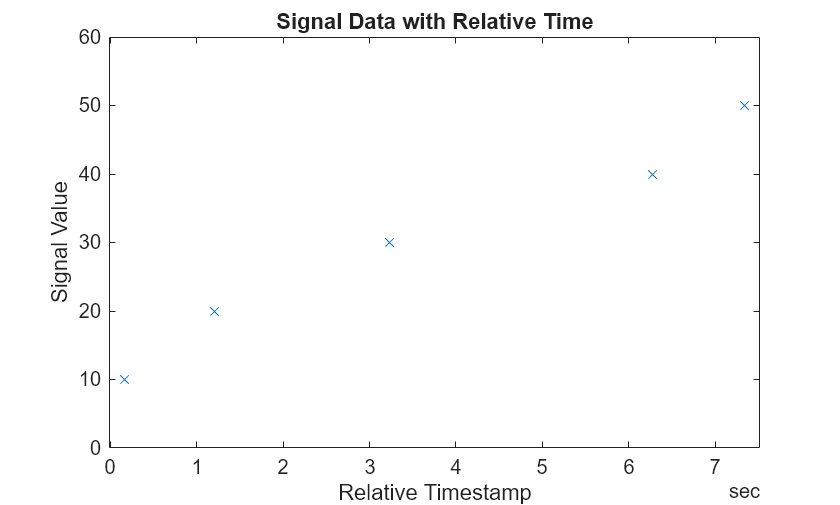
Use canSignalTimetable to repackage signal data from the received messages into a signal timetable. Note that timestamp values represent time elapsed from the start of the CAN channel.
signalTimetable = canSignalTimetable(msgRx)
signalTimetable=5×4 timetable
Time LR_WSpeed RR_WSpeed RF_WSpeed LF_WSpeed
___________ _________ _________ _________ _________
0.01929 sec -100 -100 -100 10
1.0376 sec -100 -100 -100 20
3.0512 sec -100 -100 -100 30
6.0751 sec -100 -100 -100 40
7.0988 sec -100 -100 -100 50
plot(signalTimetable.Time, signalTimetable.LF_WSpeed, "x") title("Signal Data with Relative Time", "FontWeight", "bold") xlabel("Relative Timestamp") ylabel("Signal Value") ylim([0 60])
Inspect InitialTimestamp Property
View the InitialTimestamp property of the receiving CAN channel. It is a datetime value that represents the absolute time of when the channel is started.
rxCh.InitialTimestamp
ans = datetime
19-Apr-2026 11:13:20
Analyze Data with Absolute Timestamps
Combine the relative timestamp of each message and the InitialTimestamp property to obtain the absolute timestamp of each message. Set the absolute timestamps back into the message timetable as the time vector.
msgRx.Time = msgRx.Time + rxCh.InitialTimestamp
msgRx=5×8 timetable
Time ID Extended Name Data Length Signals Error Remote
____________________ ____ ________ _______________ ______________________ ______ ____________ _____ ______
19-Apr-2026 11:13:20 1200 false {'WheelSpeeds'} {[42 248 0 0 0 0 0 0]} 8 {1×1 struct} false false
19-Apr-2026 11:13:21 1200 false {'WheelSpeeds'} {[46 224 0 0 0 0 0 0]} 8 {1×1 struct} false false
19-Apr-2026 11:13:23 1200 false {'WheelSpeeds'} {[50 200 0 0 0 0 0 0]} 8 {1×1 struct} false false
19-Apr-2026 11:13:26 1200 false {'WheelSpeeds'} {[54 176 0 0 0 0 0 0]} 8 {1×1 struct} false false
19-Apr-2026 11:13:27 1200 false {'WheelSpeeds'} {[58 152 0 0 0 0 0 0]} 8 {1×1 struct} false false
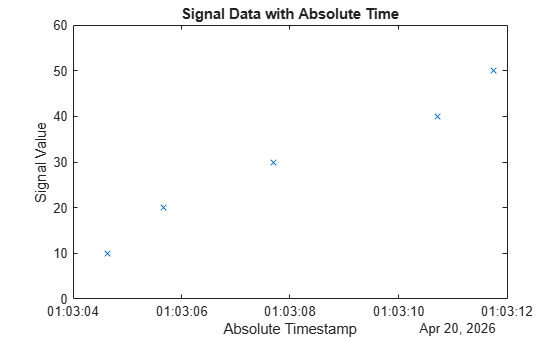
The signal timetable created from the updated message timetable now also has absolute timestamps.
signalTimetable = canSignalTimetable(msgRx)
signalTimetable=5×4 timetable
Time LR_WSpeed RR_WSpeed RF_WSpeed LF_WSpeed
____________________ _________ _________ _________ _________
19-Apr-2026 11:13:20 -100 -100 -100 10
19-Apr-2026 11:13:21 -100 -100 -100 20
19-Apr-2026 11:13:23 -100 -100 -100 30
19-Apr-2026 11:13:26 -100 -100 -100 40
19-Apr-2026 11:13:27 -100 -100 -100 50
figure plot(signalTimetable.Time, signalTimetable.LF_WSpeed, "x") title("Signal Data with Absolute Time", "FontWeight", "bold") xlabel("Absolute Timestamp") ylabel("Signal Value") ylim([0 60])
Close the Channels and DBC File
Close access to the channels and the DBC file by clearing their variables from the workspace.
clear rxCh txCh clear db